2019 Build Blog Week Three
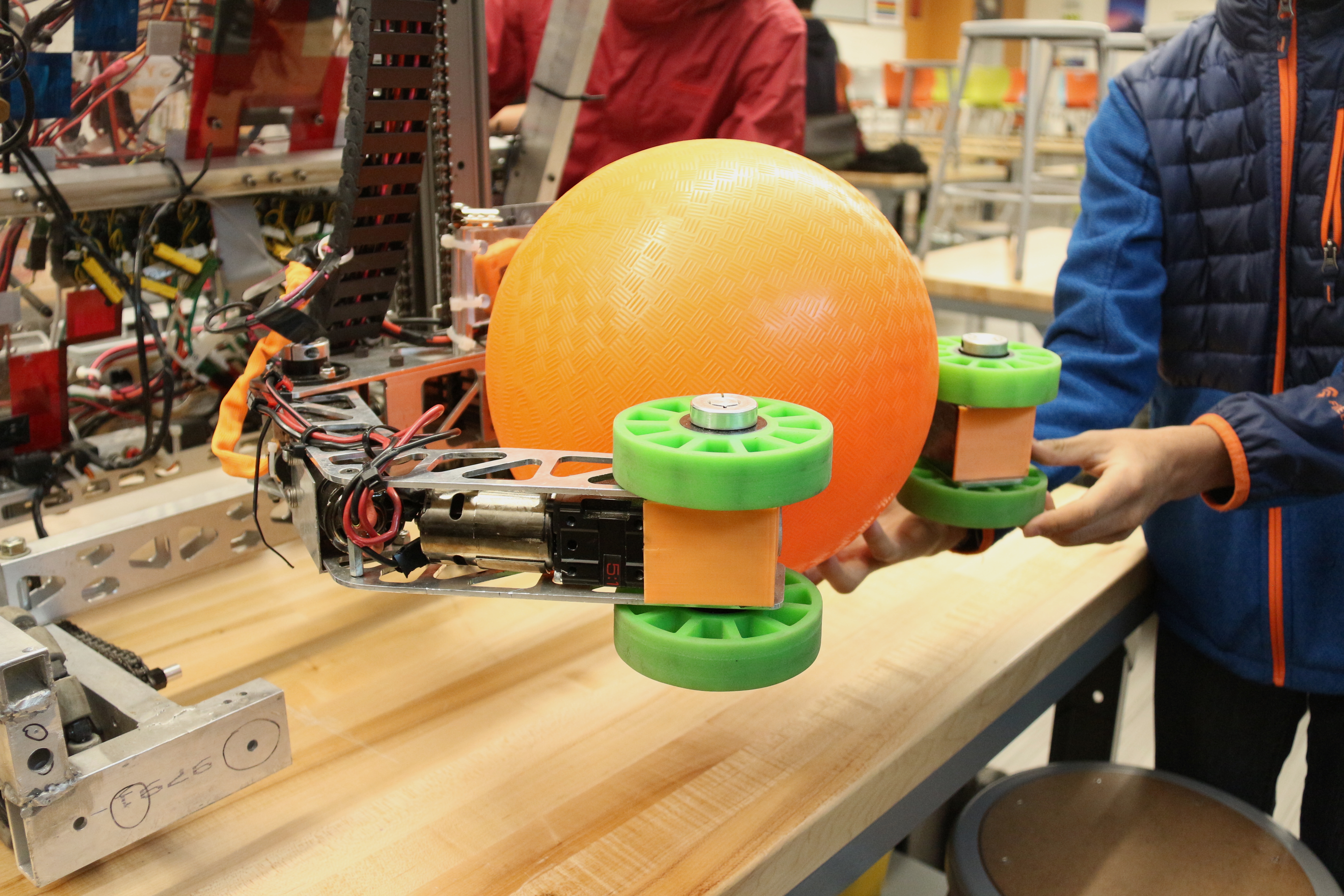
Summary of Week 3: Lots done, lots to go. The main focuses this week were CAD and manufacturing. Our robot CAD is nearly complete, and we have manufactured our robot’s drive rails and brackets for the chassis. Meanwhile, programmers created our state-space library and wrote the code to control our elevator and wrist mechanisms. With the confirmation of design came the beginning of fabrication, with students working diligently in the metal shop to make drive rails for the drivetrain. We were able to begin working on the drivetrain fairly quickly, as we used a parametrically CAD-ed chassis made during the offseason to save valuable work time. Although the final robot CAD is not done, we have made progress in fully designing the individual mechanisms and planning how they fit together. We are especially emphasizing discussion and design reviews in order to ultimately have a better product. The CAD team worked vigorously this week to transform our CAD from a mock elevator on a semi-complete drive base into a full robot design complete with a drivetrain and mechanisms. All that remains is a few refinements: brackets, size adjustments, and mounting holes. Our robot design–now that it is more fully fleshed out–has an elevator with an arm attached to lift balls and [...]