

To begin, our primary focus during the week was our CAD finalization and tuning of our drivetrain. We considered our overall packaging and how each of our mechanisms would fit together. We had to account for the amount of space we had available on our drivetrain, while keeping the accessibility of the electrical board in mind. We settled on a large billet to attach all of our mechanisms to, which would be capable of flipping out in order to service electrical components.
From there, we had to decide how we wanted to climb and where it would be on the robot. We designed a telescoping arm with two strings in order to hook our robot onto the bar and lift ourselves with a winch. We tried to limit how much space it took on the robot to account for the size of our indexer and intake.
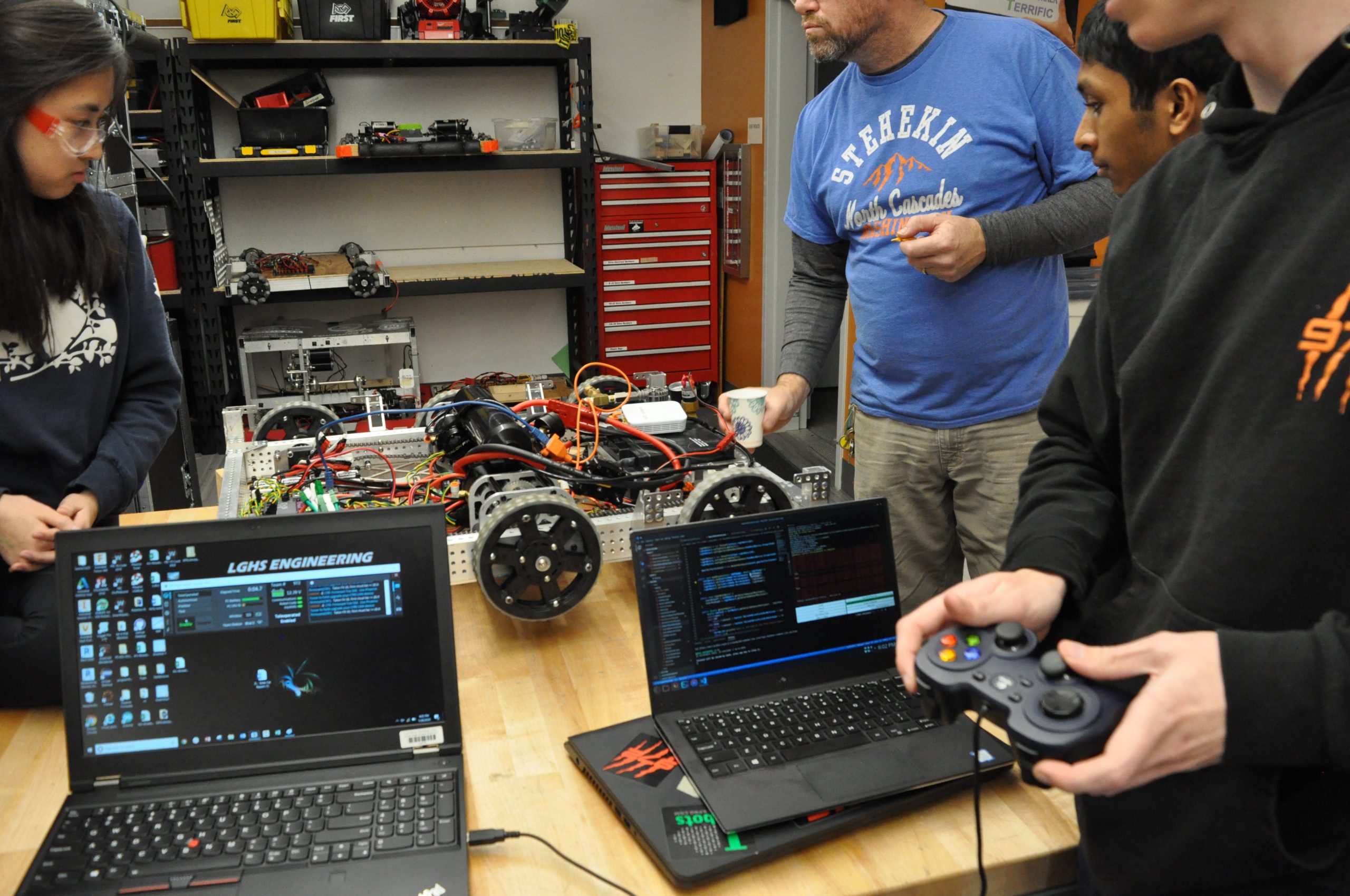
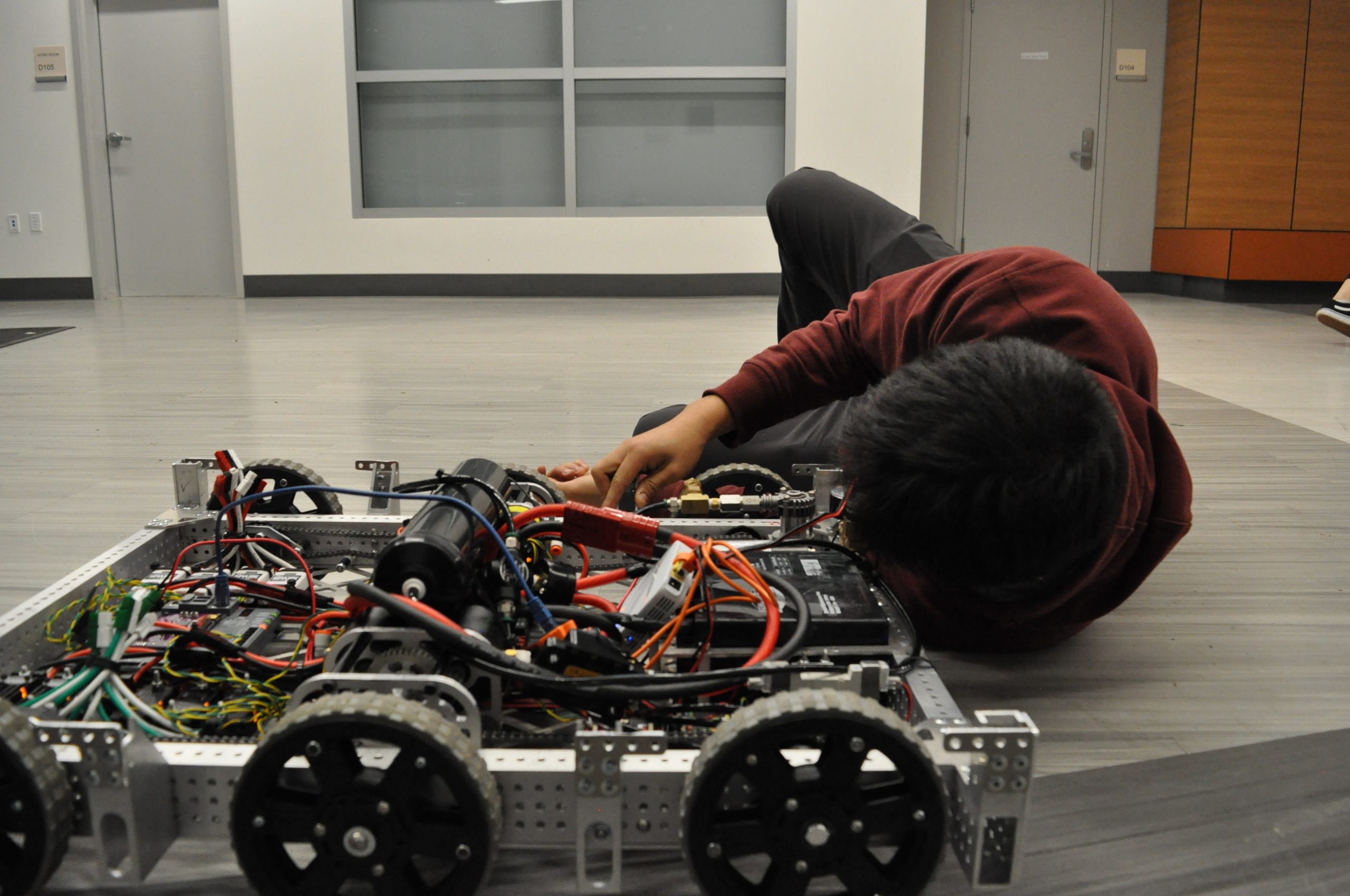
We finished up the drivetrain assembly, checked our electrical board, and then finished installing pneumatic components. Afterwards, some of our mechanical team and programming team began drivetrain testing. We discovered an issue with spacing in our gearboxes, but it was soon resolved and testing continued.
As we begin week four, we hope to begin machining the parts for our final mechanisms and begin assembly on the superstructures of our robot.