

Another week has gone by and our team has continued to make a lot of progress in each field of our robot construction. Week 5 has ended on a very positive note!
Our programming team has been working on their code and preparing it to test on our robot. The Vision team has successfully created a working vision system on our classbot and are continuing to clean up the code. The Scouting team is currently working on the Team display and they have created a fully working Match Display. They are also working on a way to receive scouting data without the use of Wifi. Additionally, the Game Piece programming team has merged their code for the elevator and Four Bar subsystems into the main branch. They are continuing to work on revising code based on feedback on general code structure from our mentors and Programming Director.

 The Mechanical team has been working hard to fabricate parts for our robot. The Machining team has finished making the Battery Bellypan. The team has finished fabricating the rails and are currently working on the hexshafts and Gearbox mounting plates using the CNC router. Though the Machining team is waiting for the Aluminum Stock to arrive and is experiencing minor issues with the CNC router, they have finished machining most of the parts for the elevator with only a few parts left to fabricate. The Electrical team is preparing to wire the robot once the Bellypan is mounted on the robot.
The Mechanical team has been working hard to fabricate parts for our robot. The Machining team has finished making the Battery Bellypan. The team has finished fabricating the rails and are currently working on the hexshafts and Gearbox mounting plates using the CNC router. Though the Machining team is waiting for the Aluminum Stock to arrive and is experiencing minor issues with the CNC router, they have finished machining most of the parts for the elevator with only a few parts left to fabricate. The Electrical team is preparing to wire the robot once the Bellypan is mounted on the robot.
Lastly, we have also made a lot of progress on the subsystems of our robot.
The Elevator group has finalized their CAD and most of our parts have been machined. All of the aluminum side, top, bottom,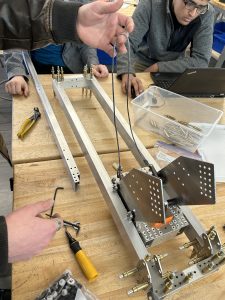 and mounting rails for all stages and 0.09” brackets are CNCed and QAed as well as the 3D printed parts are finished. The 0.09” brackets were chosen to reduce weight and due to the number of brackets on the elevator, we could make all of them in one run on the router. The group is waiting on the 0.25” plating for Gearbox and mounting. Currently the assembled part of the elevator, the carriage, first stage, and top of base, is weighing in at a mere 11.4 pounds.
and mounting rails for all stages and 0.09” brackets are CNCed and QAed as well as the 3D printed parts are finished. The 0.09” brackets were chosen to reduce weight and due to the number of brackets on the elevator, we could make all of them in one run on the router. The group is waiting on the 0.25” plating for Gearbox and mounting. Currently the assembled part of the elevator, the carriage, first stage, and top of base, is weighing in at a mere 11.4 pounds.
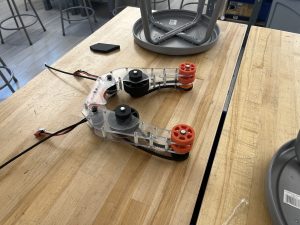
The Intake group completed all of the pulleys and wheels with 3 idlers. When intaking the game pieces, the idlers keep the belt from contacting the pieces and allow us to create a lighter and more compact intake. The intake is currently around 2.9 pounds and they are looking forward to testing it with the programmers in the following week.
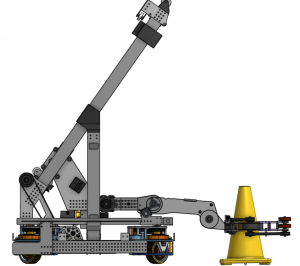
Finally, the Four Bar Arm group finished the drawing files and CAM work for the Four Bar, which has been sent to the machine shop. The group also manufactured all of the polycarbonate pieces on the router. To be more efficient, we machined all of the intake and Four Bar polycarbonate in one run of the router.
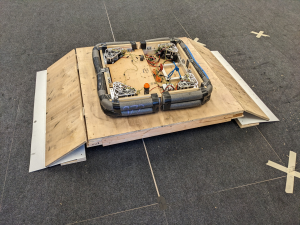
We are also continuing our driver tryouts and ensuring that our drive team this year will have a lot of practice with the robot. Our game field setup in our communityr oom is a great replica of the actual field, containing a charging station, grid, and game pieces placed on the carpet. The charge station recently broke due to the awkward angle the bumpers of the robot were hitting the station, causing the station to move away instead of pulling down the first ramp and making it easier for the robot to move up on it. We are currently finding a way to fix the charging station and problem with the bumpers.

With another week completed, students have been working hard to assemble our robot. We are excited to see how we will progress in the upcoming week as we finish assembly, electrical wiring, and handing it to the programmers who have finished with the skeleton code, tuning the PID, and organizing the structure of the code. We are preparing and looking forward to our first competition during week 1 in Port Hueneme!