

Week 3 was a very decisive week for the whole team.
We started off the week with design presentations of our prototypes. We narrowed down our options for our robot. We decided on 5 main designs: The Angled Elevator with 4 bar and layered intake, the Angled Elevator with 4 bar, RI3D grabber and extending wheels orienter, the 4 Bar Lead screw, (“Wheeled”) layered intake with a fixed bar orienter, the 971 Arm, RI3D grabber with extending wheels orienter, and the 971 arm with wheeled Intake and extending wheels orienter. With these designs, we did a team decision matrix where we split into five groups and scored each design based on a couple different criterias. The results of this are the designs with the RI3D Grabber were voted least. The 4 Bar Lead screw, (“Wheeled”) layered intake with a fixed bar orienter and the 971 arm with wheeled Intake and extending wheels orienter were pretty even in terms of votes. The Angled Elevator with 4 bar, layered intake was the clear winner. Our DVC voted and we ended up choosing the angled elevator with a 4 bar arm, a layered intake and a fixed bar orienter.
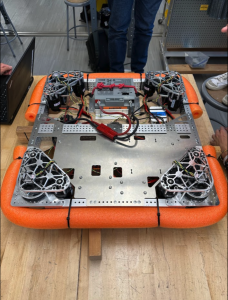
On the mechanical side of the team, the machinists have been working on the belly pan and bumpers of the robot. The electrical subteam has been hard at work wiring the drivetrain, which will then allow us to start driver tryouts for competitions to come. This year’s compact electrical board and swerve drivetrain have allowed our robot to be the smallest we’ve ever made, with a 26” x 26” drivetrain, making it more maneuverable and easier for our robot to fit on the charge station for the new game. The team has decided that our robot will not include any pneumatic components, while continuing to be attentive about the weight distribution of the robot. This weekend, we finished the assembly of our competition drivetrain using a temporary wooden bellypan. We were able to run it alongside our fall swerve robot, on a new half-field carpet setup.
Our team has also been hard at work CADing our decided superstructure. Our programming team is working on testing with AprilTags, our autonomous routine, and swerve. Programmers are also giving input to the CADers to make sure our final design will be feasible from a programming standpoint. Our Scouting team has discovered dark mode, and is working on their design doc, team pages, and the robot’s start position for auto.
Overall our team has been hard at work this week and we will be moving forward with designing and also machining our subsystems.