

This past week, on Friday and Saturday, our team competed in the Silicon Valley Regional in San Jose.
We were able to load in one day early and due to this, we were able to completely dedicate the practice day to playing as many practice matches as we could. During our practice matches we tested out new autonomous routines that were developed and evaluated the limits of the robot.
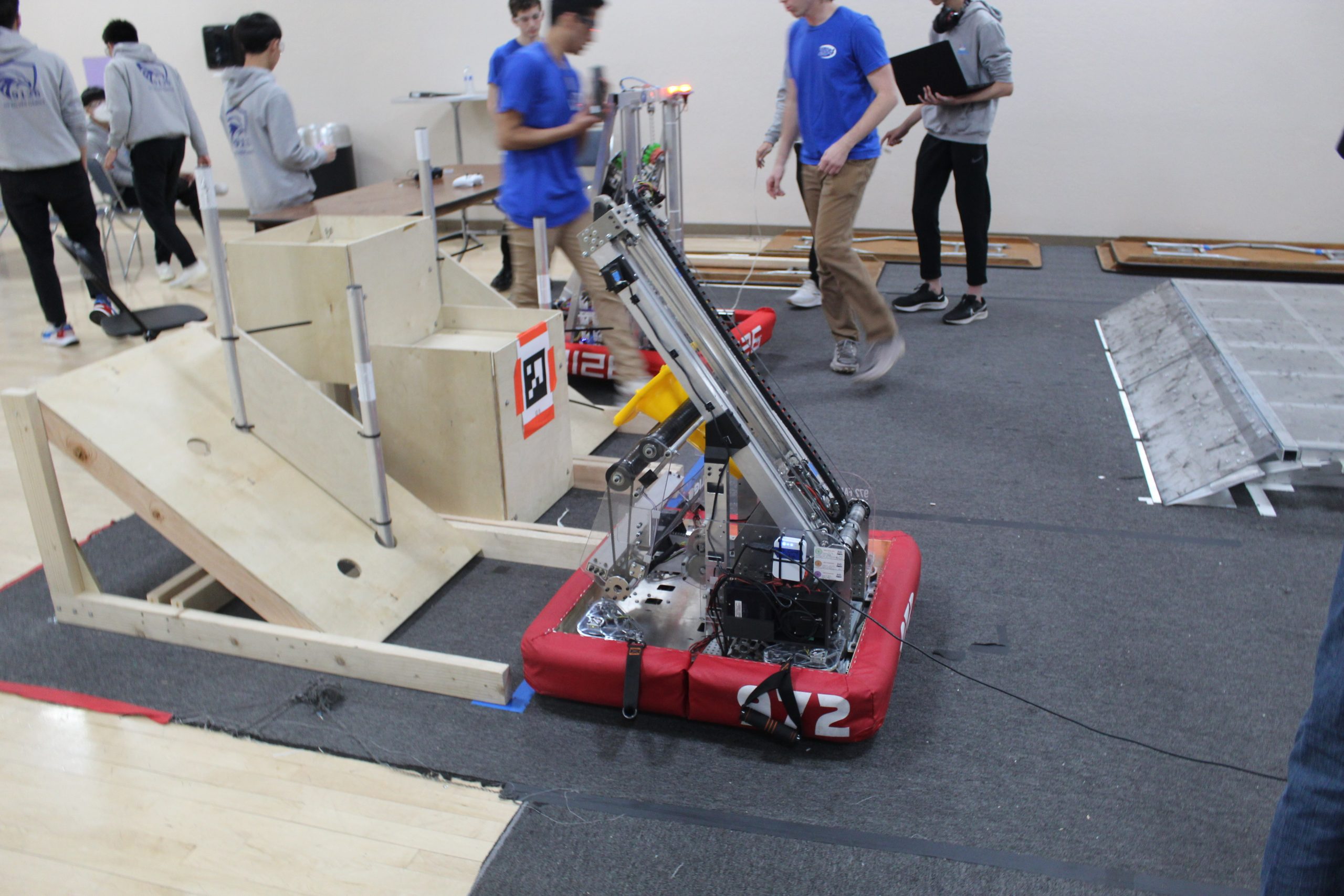
Silicon Valley Regional was a great competition for our team to demonstrate the new changes made to our robot. At the San Francisco Regional, we would usually deposit a single game piece onto the grid and balance on the charge station during autonomous. However, we tested out the new autonomous routines, which consisted of both two-piece and three-piece routines at this competition. The three-piece routine was able to run when the robot started in a certain position. We were able to score game pieces quicker and more accurately, and we had the same game piece configuration as we did in the San Francisco Regional.
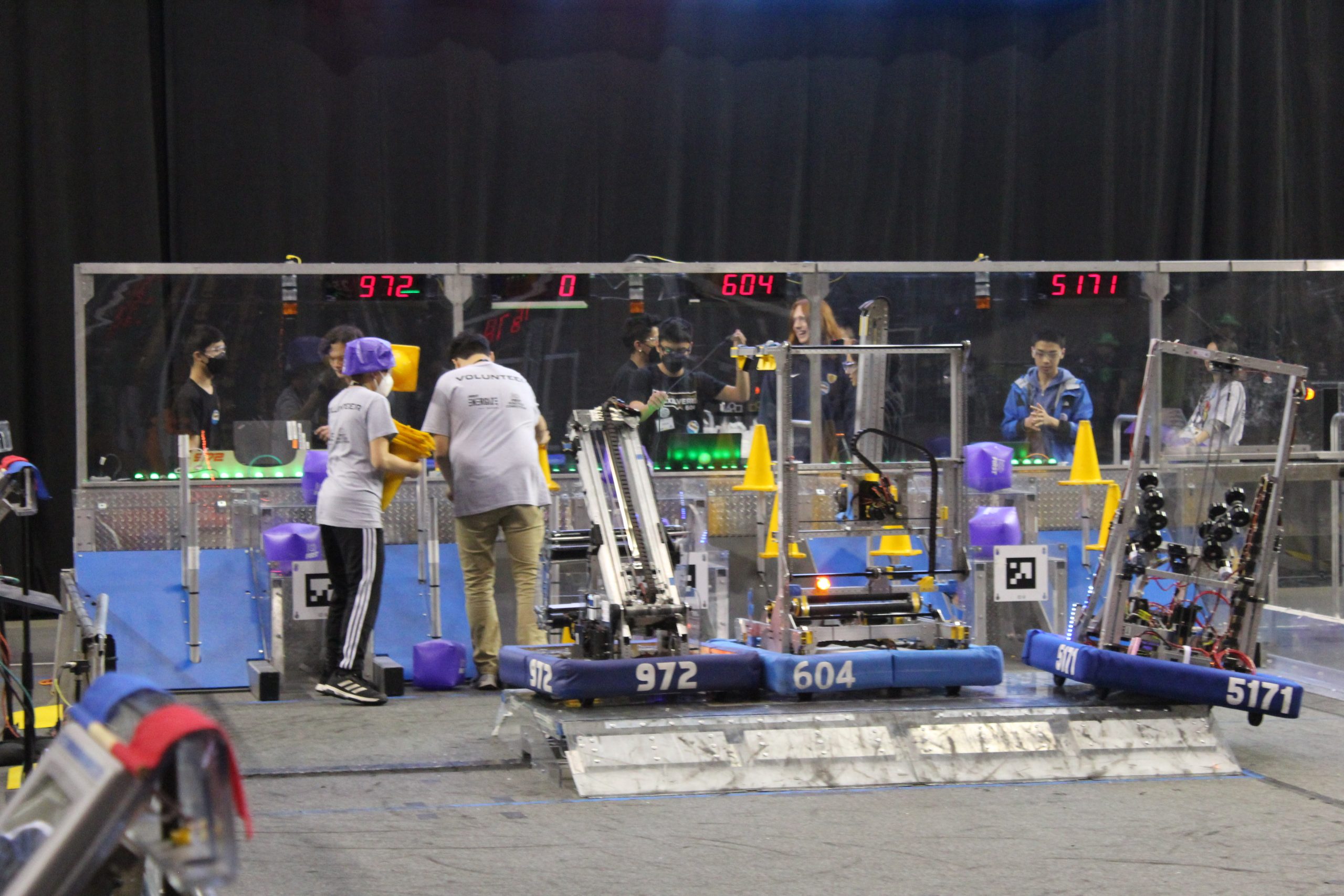
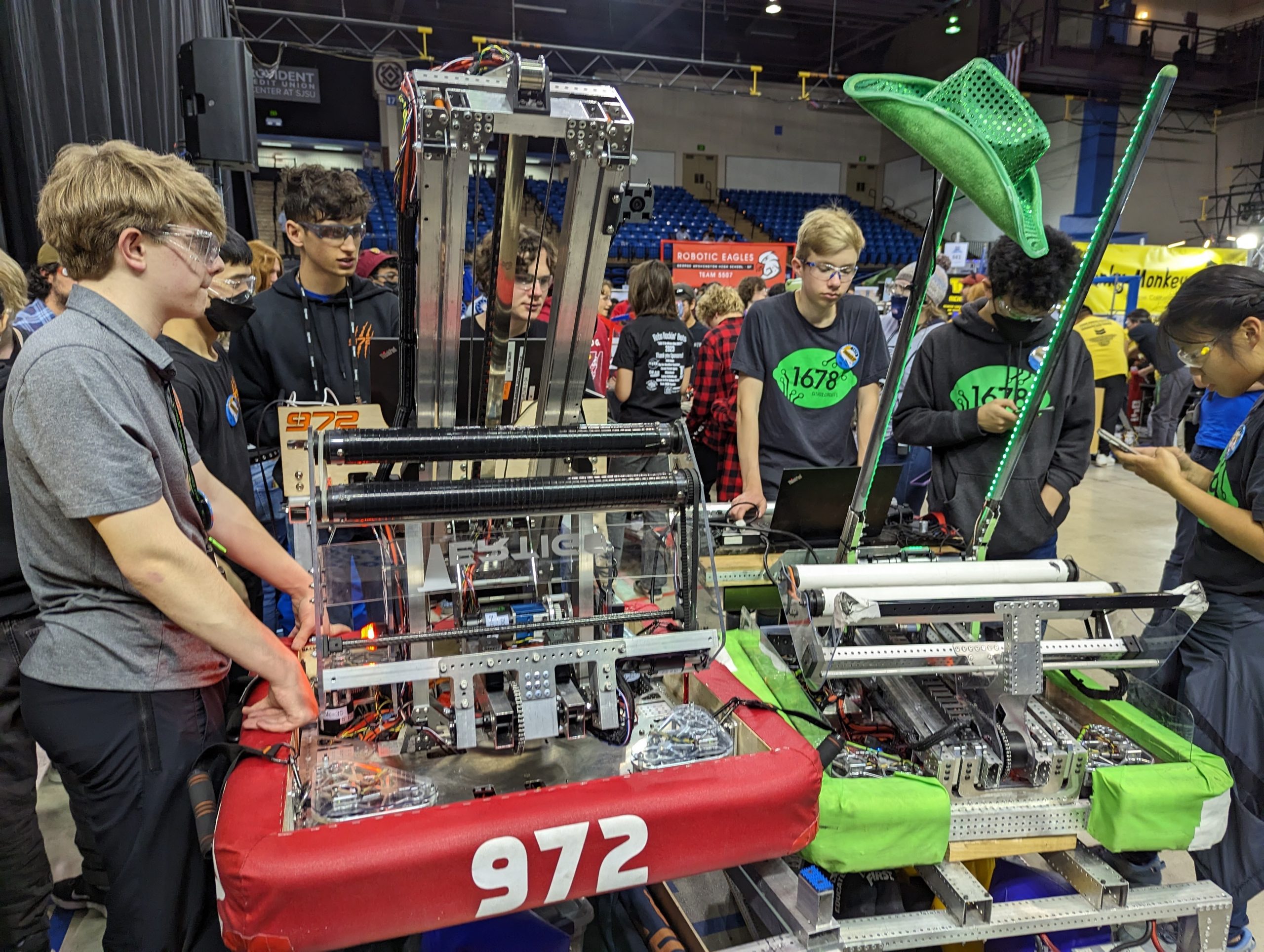
Ultimately, our team ended up in 9th place after the qualification matches. During alliance selections, the captain of alliance #3, team 604, Quixilver, invited us along with team 5171, Deus Ex Machina, to join their alliance. Our alliance fought hard against opposing teams, eventually making it to the finals where we competed against team 254, the Cheesy Poofs, team 1678, the Citrus Circuits, and team 100, The Wildhats. During the playoffs, our alliance’s strategy during auto consisted of depositing game pieces in the grid and balancing on the charge station. Each team in our alliance played a vital role during this period, with team 972 and 604 scoring as many game pieces as possible, and 5171 balancing the charge station. Then, during teleop, our alliance rushed to fill the grid with game pieces, creating links that would give many points. When it came time for endgame, we were able to balance all three robots in the alliance on the charge station. Although we did not win the Silicon Valley Regional, our alliance did an exceptional job – we placed second in the competition and performed outstandingly against some of the best teams in the world.
Our team had a great time at Silicon Valley Regional and we are currently seeking ways to improve from our mistakes. As we draw closer to the World Championships, we are working on making several software and mechanical changes, such as replacing the roborio mount and the swerve wheels and further developing our complex autonomous routines.
