

By attending Silicon Valley Regional last week, our team was given the opportunity to observe and learn from other teams early in the season. After a busy week at competition, our team had a thoughtful debrief to focus on what went well during SVR, as well as how we could improve our robot. In preparation for Central Valley Regional, the strategy team will be deciding the next goals to focus on for robot actions, hardware, and software, keeping in mind our functional requirements. Over the next two weeks, these respective subteams will implement these tasks in order to maximize the abilities of our robot for competition.
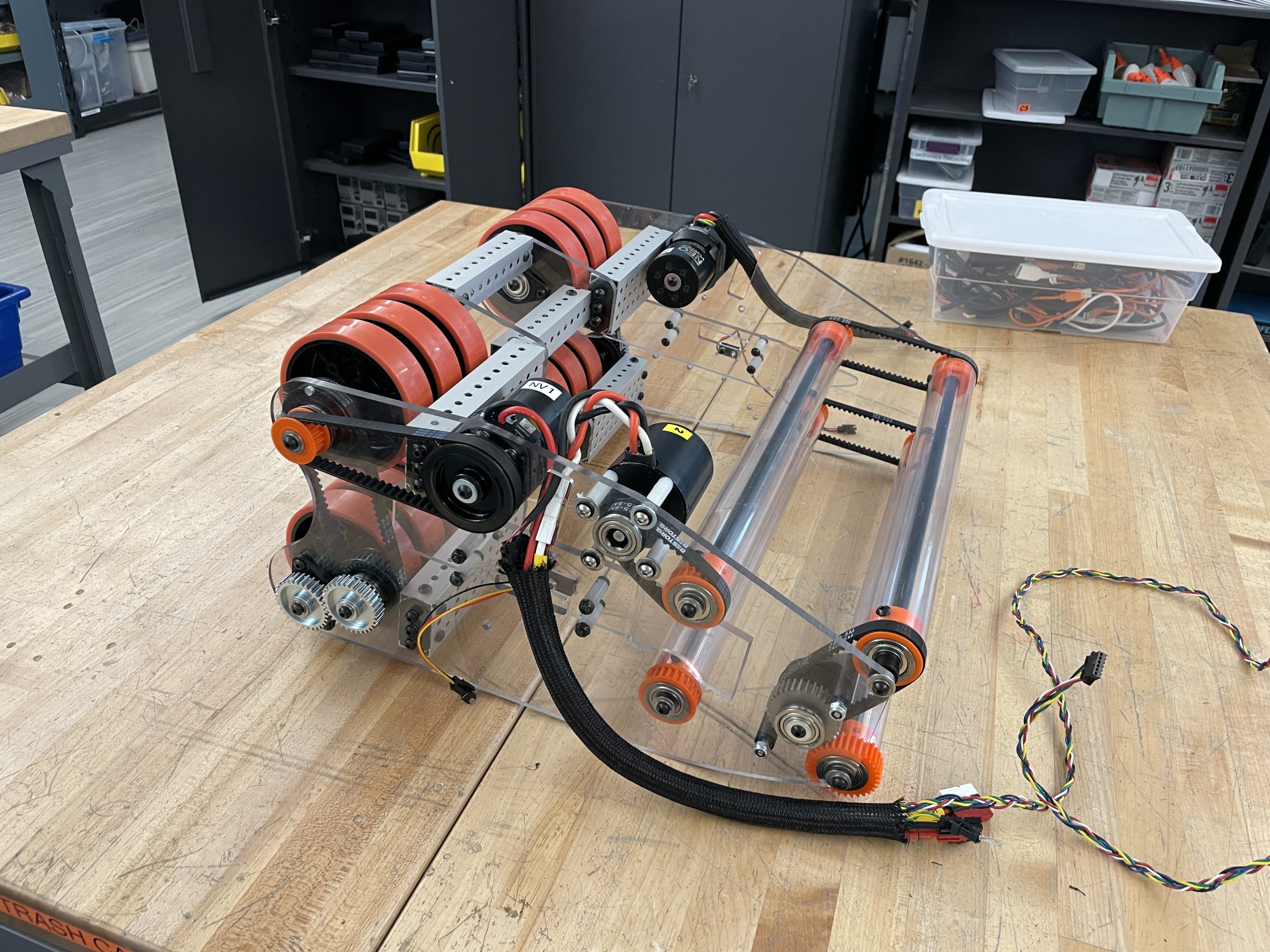
This week, our machining team has manufactured new spare parts for Vivace. On top of machining, the rest of the mechanical subteam has been hard at work assembling the modular spare parts for Vivace. These subsystems include the intake, shooter, and rotating arm. For the intake, we are working on redesigning the plates, as well as updating the billet piece for durability. Additionally, we also plan on redesigning the bumpers to increase robustness for the intake and mounting the assembled spares onto our off season swerve, Phil. During SVR, we learned that our bumpers were shifting upon impact, caving into the billet piece causing the piece to take damage. In order to fix this, we are redesigning our bumpers and closing the gap in the front that was concaving into the billet piece.

On the software side, the Auto team has been very productive. They have created a consistent four piece auto in which the robot scores the preloaded note before scoring all three notes close to the speaker. Auto has also developed many necessary paths that allow the robot to travel under the stage and to the centerline notes. Although they have not implemented shoot on the move, they plan to as soon as they have the robot to begin testing.
The software team is also busy working on auto routines and integrating vision. For vision, we have switched to new coprocessors and cameras for AprilTags. High accuracy is the goal for AprilTag vision, and our vision team is working hard to achieve this. With an accurate AprilTags system, we will know where the robot is located on the field precisely. This information can be used for accurate autos, alignment to field elements, and for shooting from different locations.
We are also continuing lots of driver and operator practice to ensure that the drive team is prepared. While our team will be busy completing many tasks over the next week, we are looking forward to presenting our robot, ready for Central Valley Regional.