

Week four has been another successful one for the team as our CAD team worked hard to complete our subsystem CADs. After the conclusion of week three, our DVC, the Decision Voting Council, has decided to implement a continuous intake, and a top-down shooter, combined with a hook to allow us to climb.
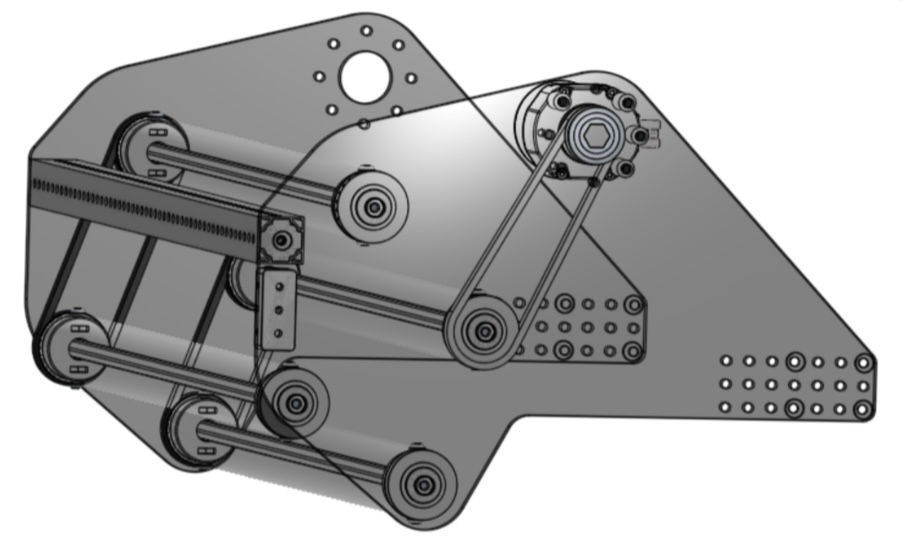
For our shooter, first, we had to work out an accuracy issue with the original prototype. We determined that we needed to fix an RPM issue with the motors, then fixed and rewired the motors with our test bed. In terms of CAD, the pivot point for the shooter was changed. In addition, we updated the shooter to be more secure with polycarb plates on each side and better bearing security. The flywheel was also altered to have more rigidity than the original prototype. For the indexer, we plan to use polycarbonate tube rollers.
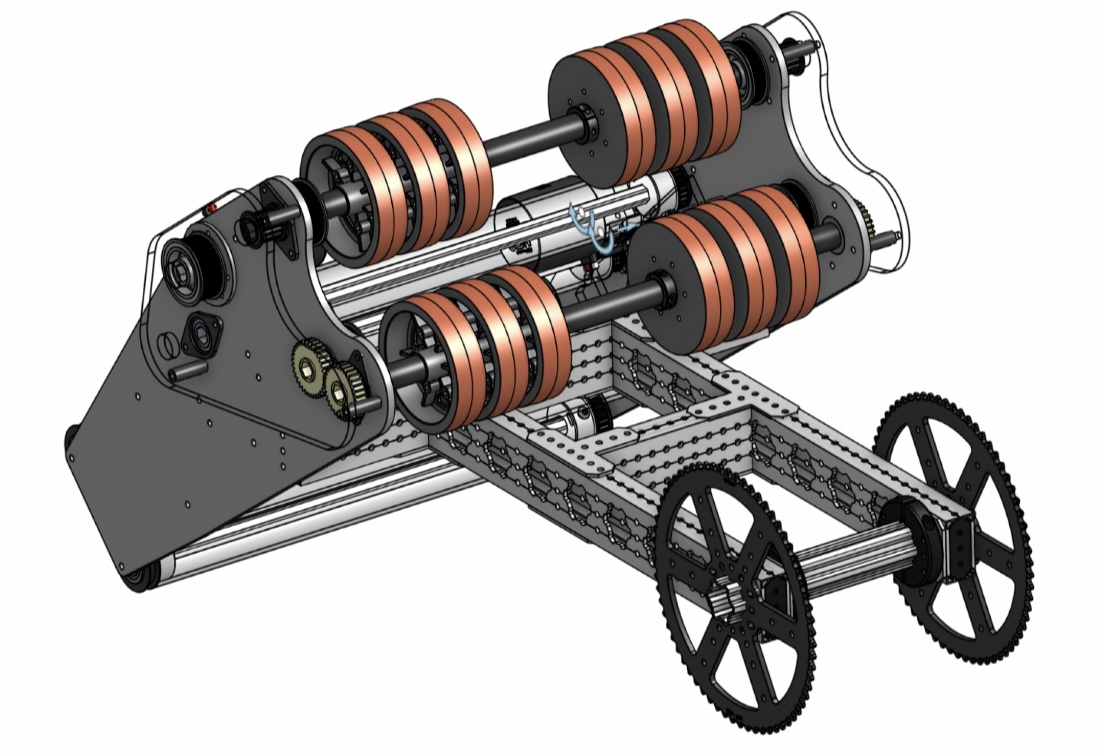
Regarding the climber, the plan is to have hooks on the shooter which will hook the chain and pull our robot off the ground. Not much has been done in this regard so a more detailed update will come next week.
Our design team also decided to switch from an over-the-bumper intake to an under-the-bumper intake due to issues with vision camera visibility and robustness of the original intake design. The original intake design was not as serviceable and was more susceptible to damage from head-to-head robot collisions which our design team decided was too much of an issue. The intake is also now fixed, rather than rotating. As of right now, we are prototyping the new intake and will be testing it throughout week five.

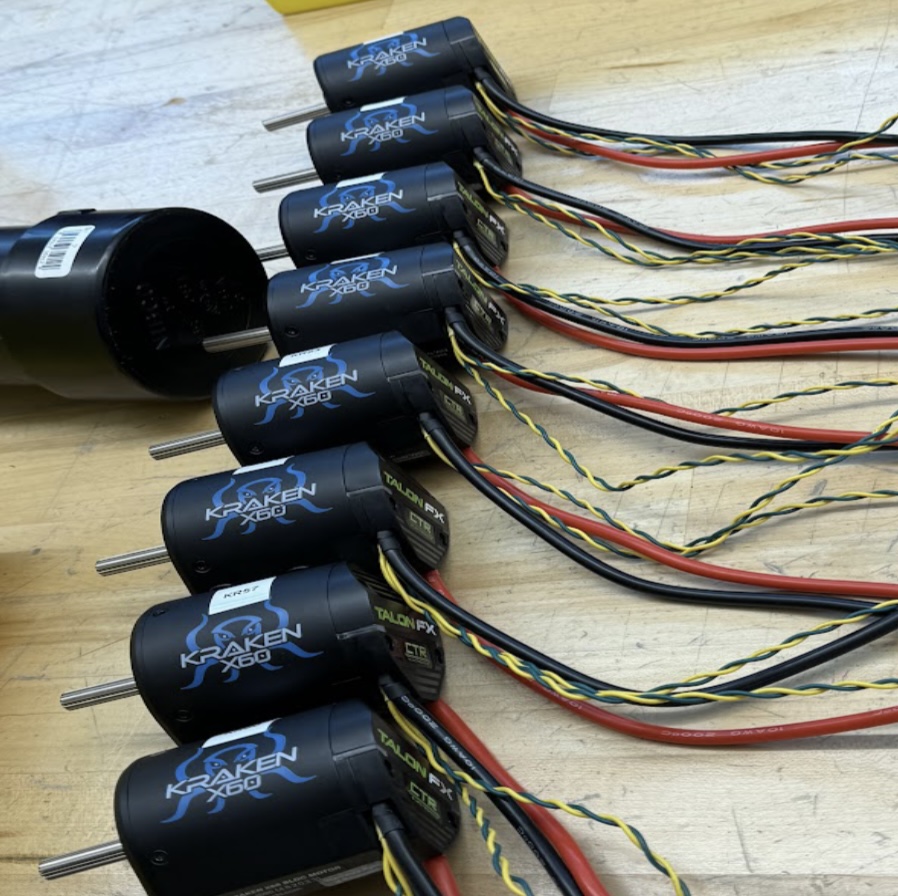
Other announcements include receiving Krakens, which we have been testing and plan to incorporate into our swerve. Props to students who notified the mentors to get these.
We ID’d the new Krakens and have been testing them over the past few days to ensure that there are no issues with our new motors, however, we noticed that several of our motors made strange noises at low speeds. Our team is troubleshooting these issues, but once they’re resolved, the Krakens will be mounted on our competition swerve drive.
Finally, to end this week off, we held robot driver tryouts! Interested students went through a series of tests and were judged based on their speed and precision. Results will be decided and released in the week 5 blog.
This upcoming week we will be working around the clock to complete the CAD and machine all of our parts and focusing on more programming with our new drivetrain featured in last week’s blog. Our scouting app will be completely finalized and our operations work involving merchandise and team pins will be finished. This is goodbye for now from team 972, Iron Claw Robotics. Check out our next blog for the preliminary machined robot and an update on the subsystem components manufacturing and assembly of our robot!