

After our most successful season yet, Iron Claw Robotics is feeling upbeat and ready for the 2024 Crescendo Build Season! On Saturday, January 6th, our team met over winter break for our annual kickoff day to watch the game release. This year’s 2024 game consists of a ring-shaped game piece called a note, which can be deposited into three field elements: the amp, speaker, and trap. Although the endgame is not a time constrained section, robots can choose to climb on a chain with other robots or score in traps.
Over the weekend, the team focused on strategy, dividing into five groups to discuss the best ways to maximize points and create potential auto paths during matches. On Sunday, after the groups presented their strategies to the class followed by a team discussion, the DVC (Decision Voting Council) voted on our robot functional requirements. These requirements dictate our strategy and what the robot will or will not do, playing a crucial role in our design using specific metrics to follow. Devising a detailed plan for strategy is our first important step to ensure our robot’s success.
Throughout the week, we spent several meetings split into five groups to research various designs that uphold our functional requirements and team goals. After designs were presented, the DVC filtered twenty six possible subsystem designs for our robot, cut down to six prototypes and areas of further research: “Fliptake”, “95-Style” Shooter, a Continuous Intake, Elevator, a Flywheel Shooter, and “Big Arm + Wheel”.
One of our prototypes, dubbed “Fliptake”, is a mechanism that uses rollers to intake from the ground and brings the note backwards into an outtake. So far, we have prototyped with rollers on Vertigo, our 2023 robot, using two bars to manipulate the notes. However, it did not function as anticipated, so we had to change our limits in the code and undo the rigging of the elevator to see if it could ground intake.
Our next prototype, the 95-Style Shooter is a horizontal roller shooter that adds spin using either different wheels or a coaxial shaft. The team completed the CAD and the laser cutting of the prototype. We realized little spin would work, with no angled, no different speed, or different wheels. We have also laser cut the new prototype with compression.
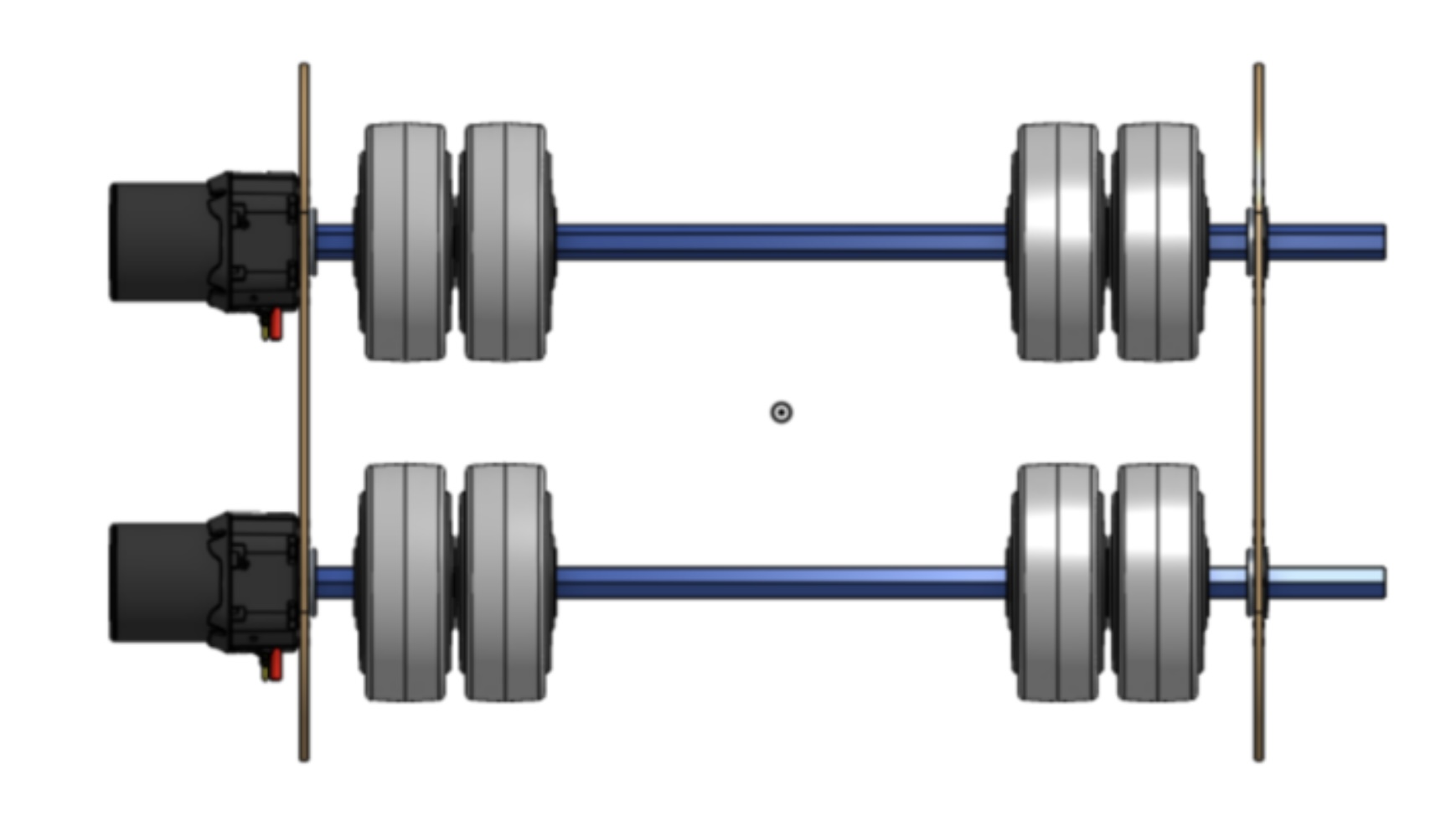
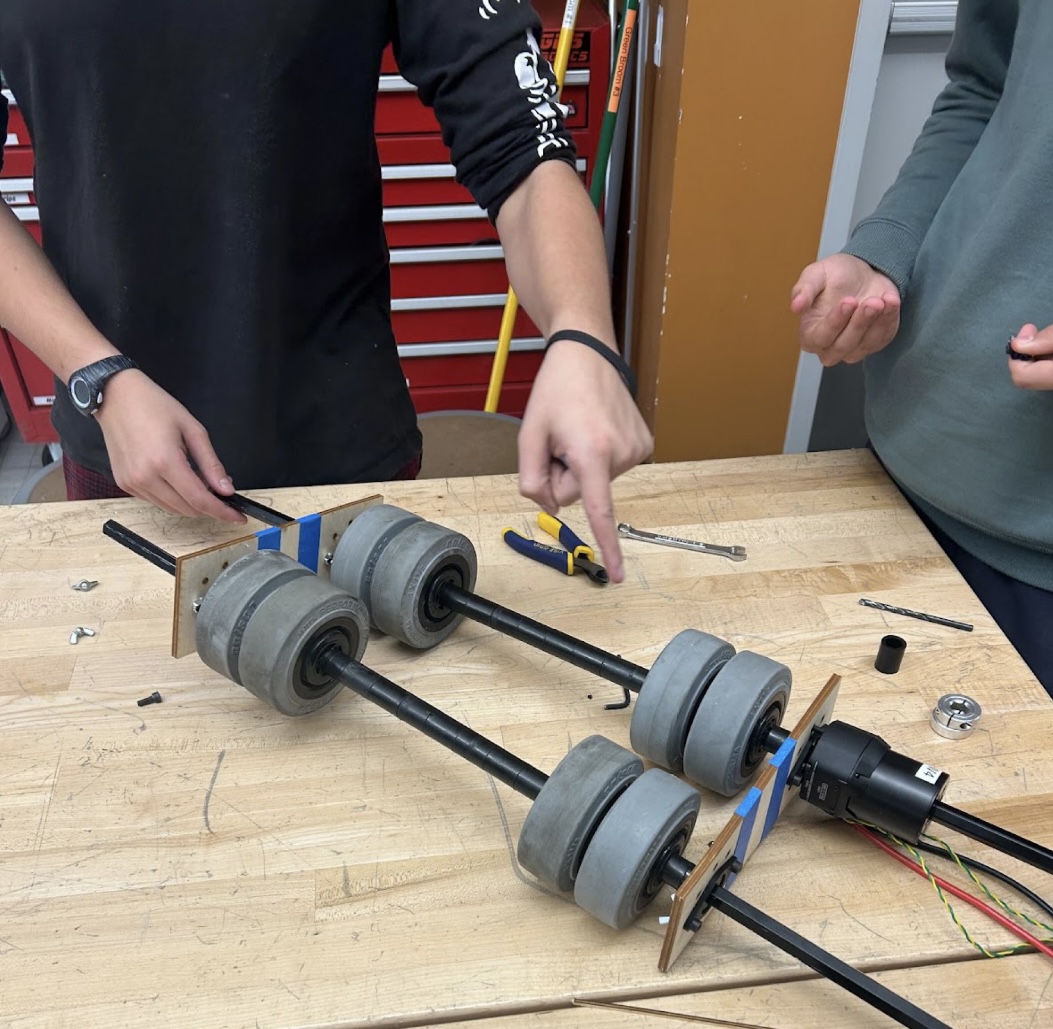
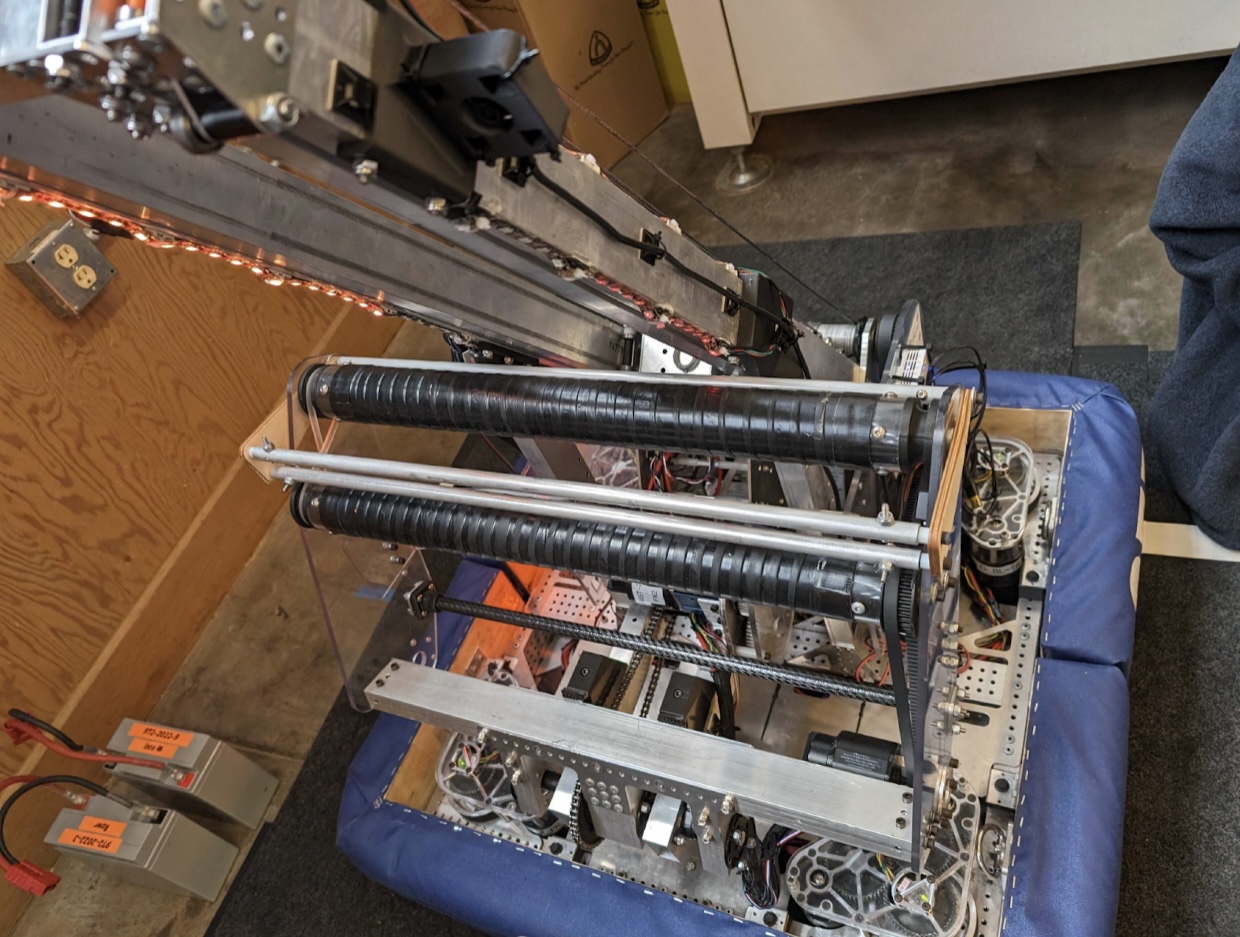
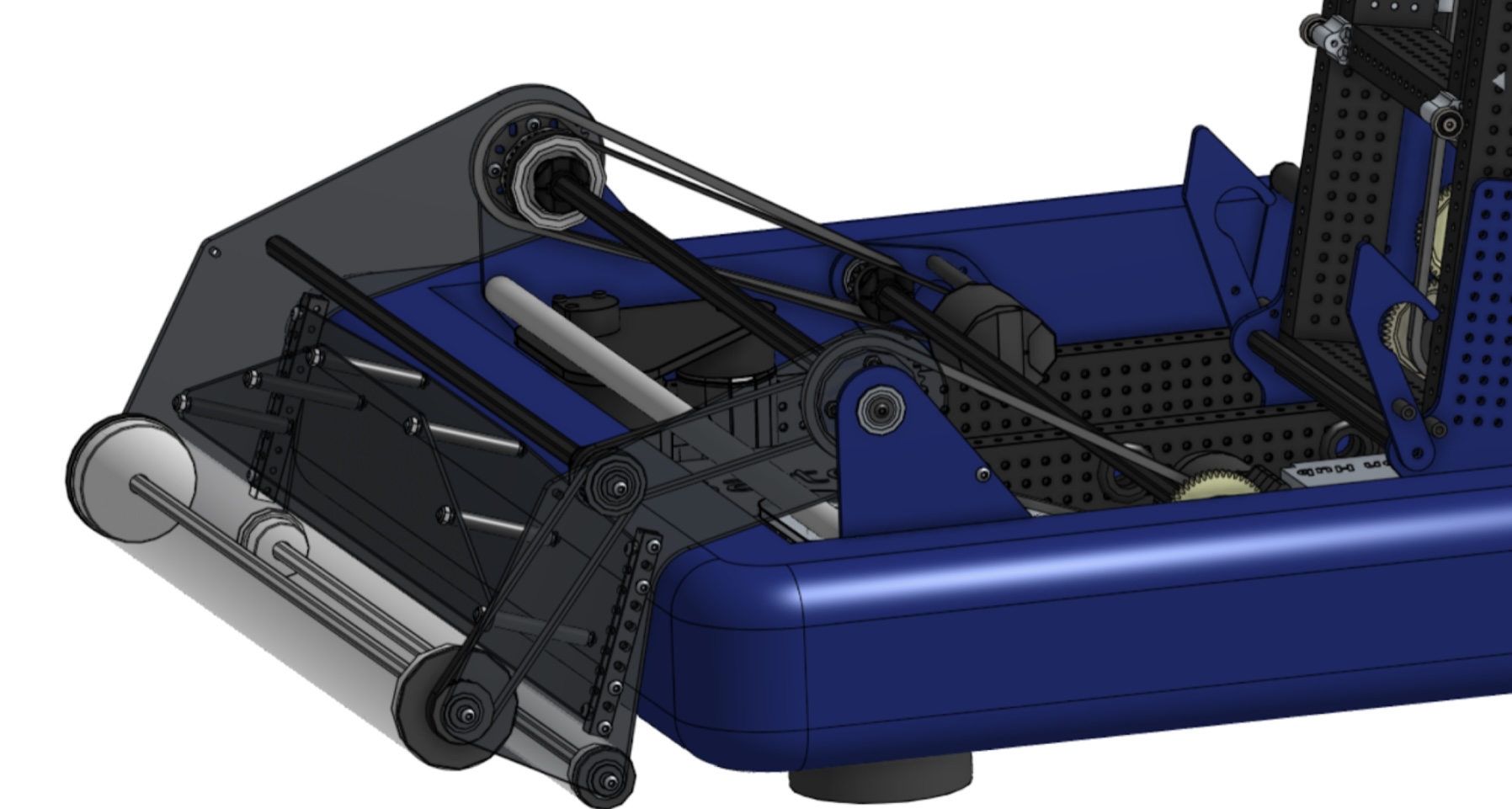
Next, our Continuous Intake, which uses a conveyor belt or roller mechanism to quickly acquire game pieces. We attempted to find geometry with a test rig. Realizing the test rig would not work, we began making a new rig to test the geometry. Later, we confirmed the 100% acquisition rate across the roller area. With our prototype, we discovered a sweet spot which scored 100% accurately on the amp, though if we want amp capability, a single pivot drop will not work. Our only issue so far is having enough wheels to model three rollers.

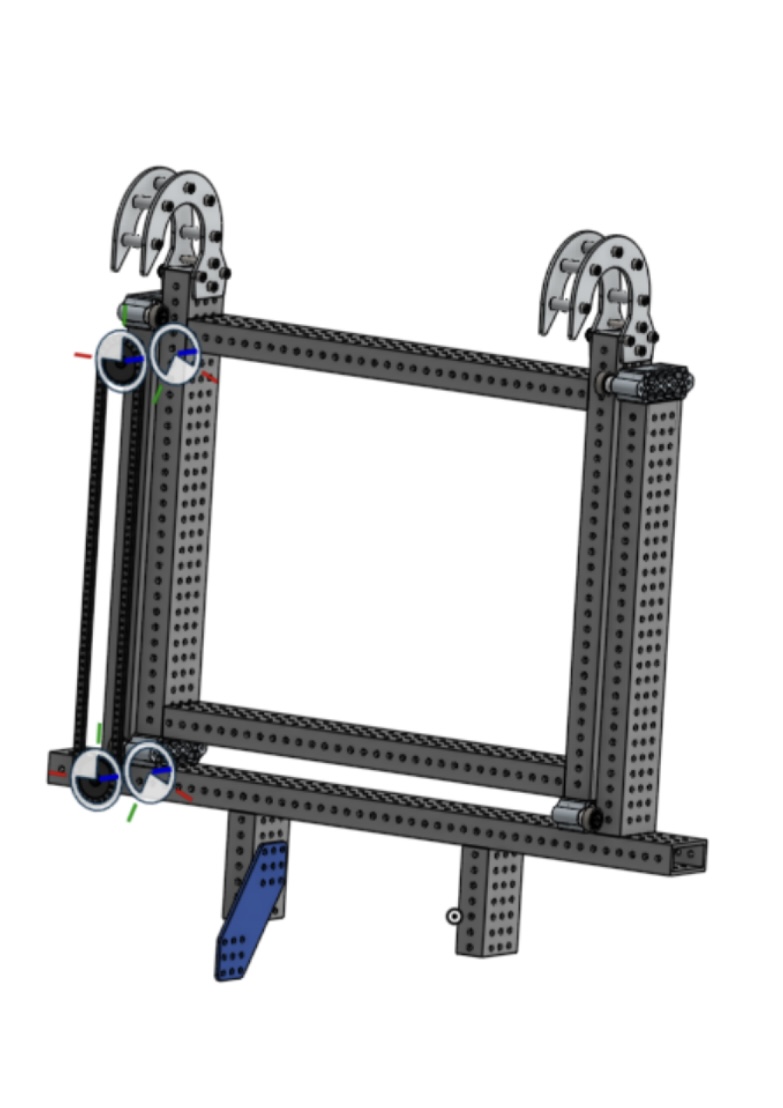
Now, getting onstage is a skill we need to have, and we are prototyping our Elevator as a potential idea, a mechanism that expands and retracts in different ways depending on the goal. The Elevator team finished the CAD model only recently. It’s effective for chain, but we realized that it could cause problems by potentially obstructing a shooter or indexer. It also contains many moving parts, taking up an entire side of the robot. Given that the lowest point of the chain is 2ft 4 ¼ inches, we’ve decided that the CAD has to be slightly altered so that the hooks are positioned lower. It provides us more room to go up so the robot can get higher off the ground.
Throughout our prototyping of the Elevator, the team has found that the Big Arm accomplishes the same thing using a simpler mechanism. We have not scrapped this project and are working on fixing the CAD. More updates to come.
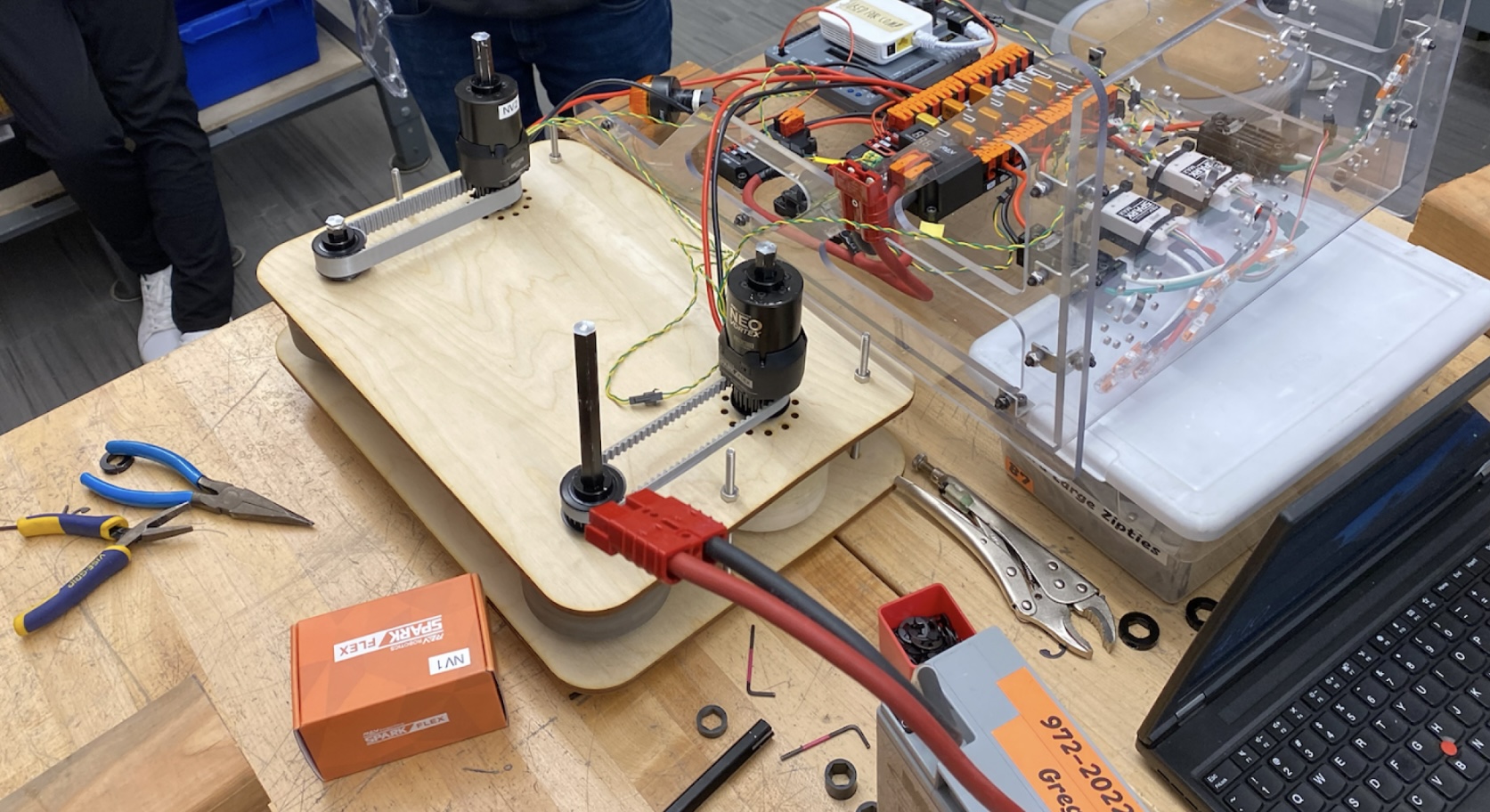
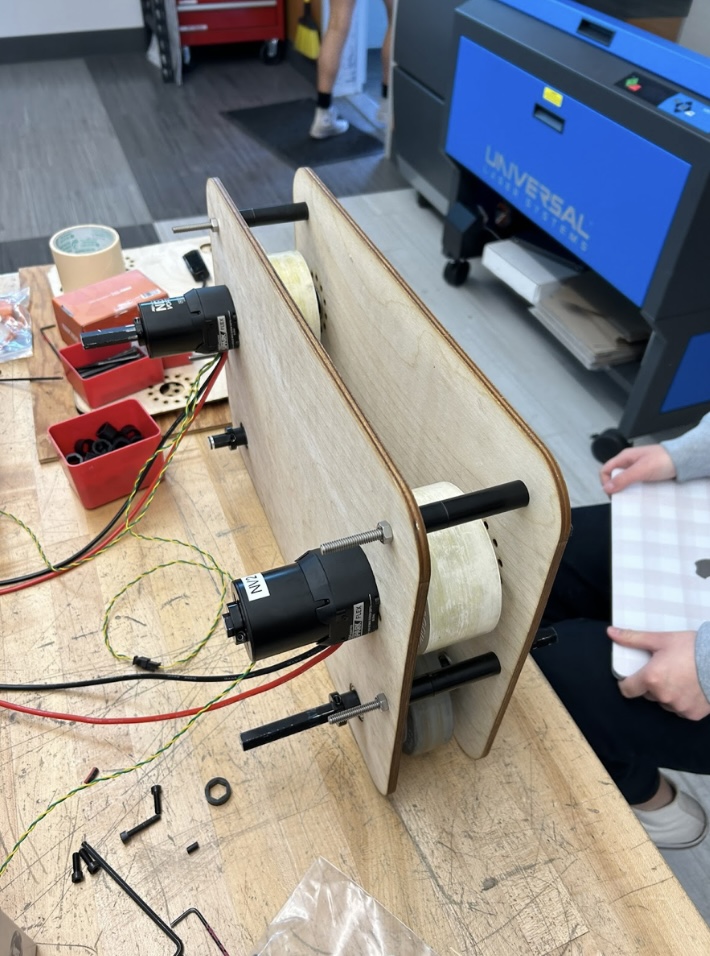
Our fifth prototype, the Flywheel Shooter, is a type of shooter that utilizes wheels that spin at high speeds to compress the game piece. The prototype team finished a CAD of the basic design. We laser cut all the parts and finished the assembly of the Flywheel Shooter, but we cannot use two motors yet. Currently, we are working on writing code for the Vortexes and fixing the shooter.
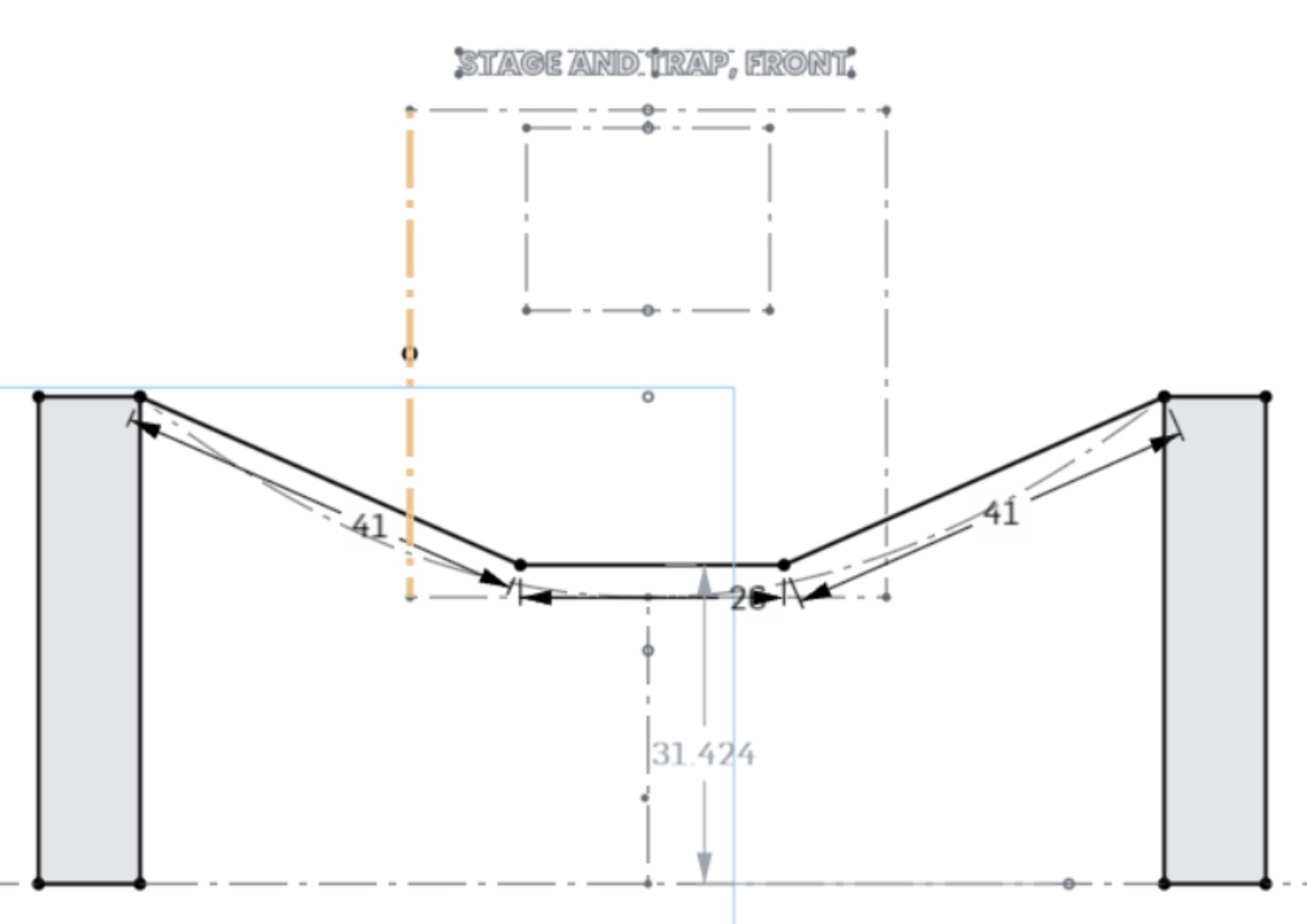
The Big Arm + Wheel prototype uses a big pivoting arm which hooks onto the chain and rides up the stage using wheels. We have tested some ideas of this prototype and confirmed that the earlier calculations were correct. Over the weekend, we have used our new chain in the practice field to model points of contact when grasping onto the chain, providing useful information for both the Elevator and Big Arm + Wheel prototype.
Outside of prototyping, the software teams have been working on autonomous and vision code to test on the robot. The Auto team has started making auto routines using Path Planner 2024, they are currently focusing on making code updates to accommodate the changes with Path Planner 2024 to allow work on Auto routines to continue.
On the Vision side of software, the team has decided that vision will be essential in Crescendo for game piece object detection and alignment form game piece scoring using the various AprilTags scattered around the field. April tag Alignment has worked in our simulator and will continue to be refined over the coming weeks. As part of involving the freshman students on the team and provide them further training, we had them work on imaging our roborios. Additionally, it was decided that Vision would be employed to detect objects for automated game piece intaking and for driver assist-automated game piece deposition in game elements.
Overall, week one has demonstrated significant productivity for the team. This year, we have been carefully analyzing how to improve and maximize our time during the build season. As we continue to finish our prototypes throughout the week, we look forward to finalizing our robot design in preparation for our first Crescendo competition, Silicon Valley Regional.