

As February comes to a close, students have been hard at work during their break. Week seven has led our robot to progress nicely. All of our sub teams have been working hard to prepare for our first competition of the year, Silicon Valley Regional.
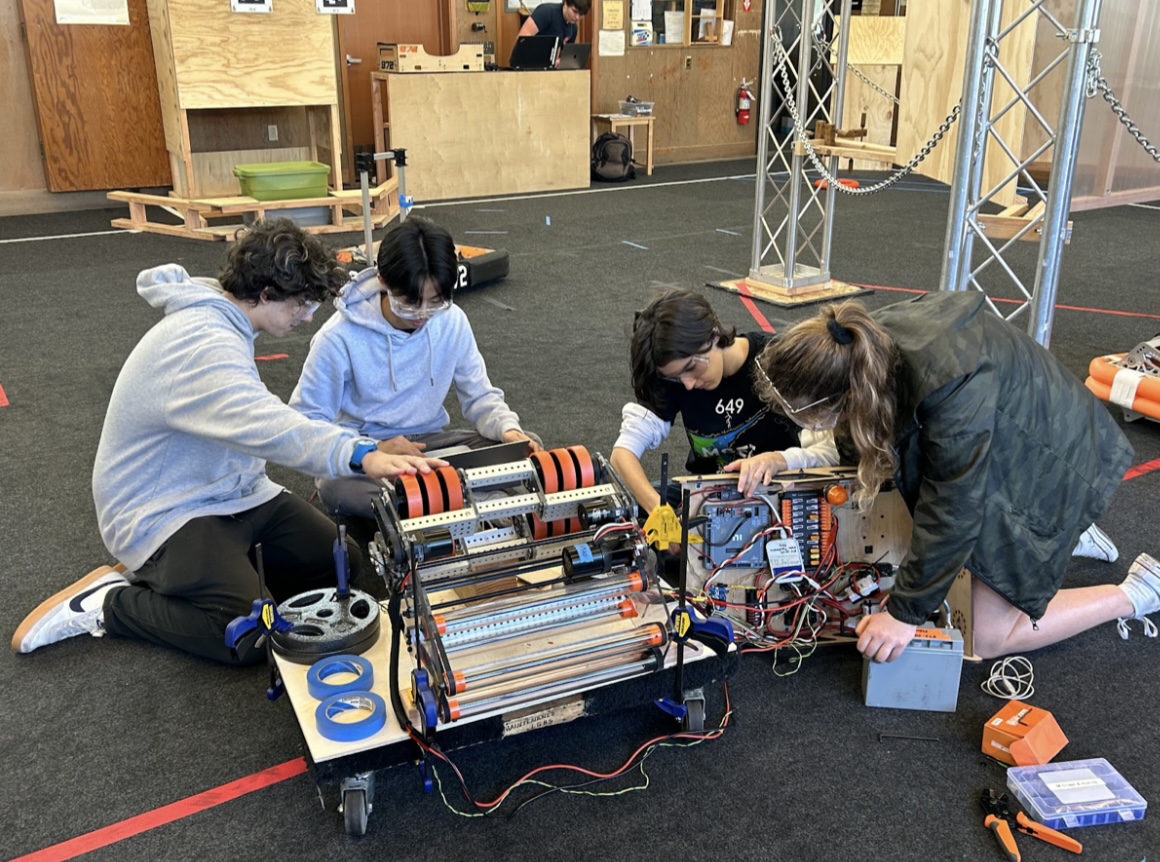
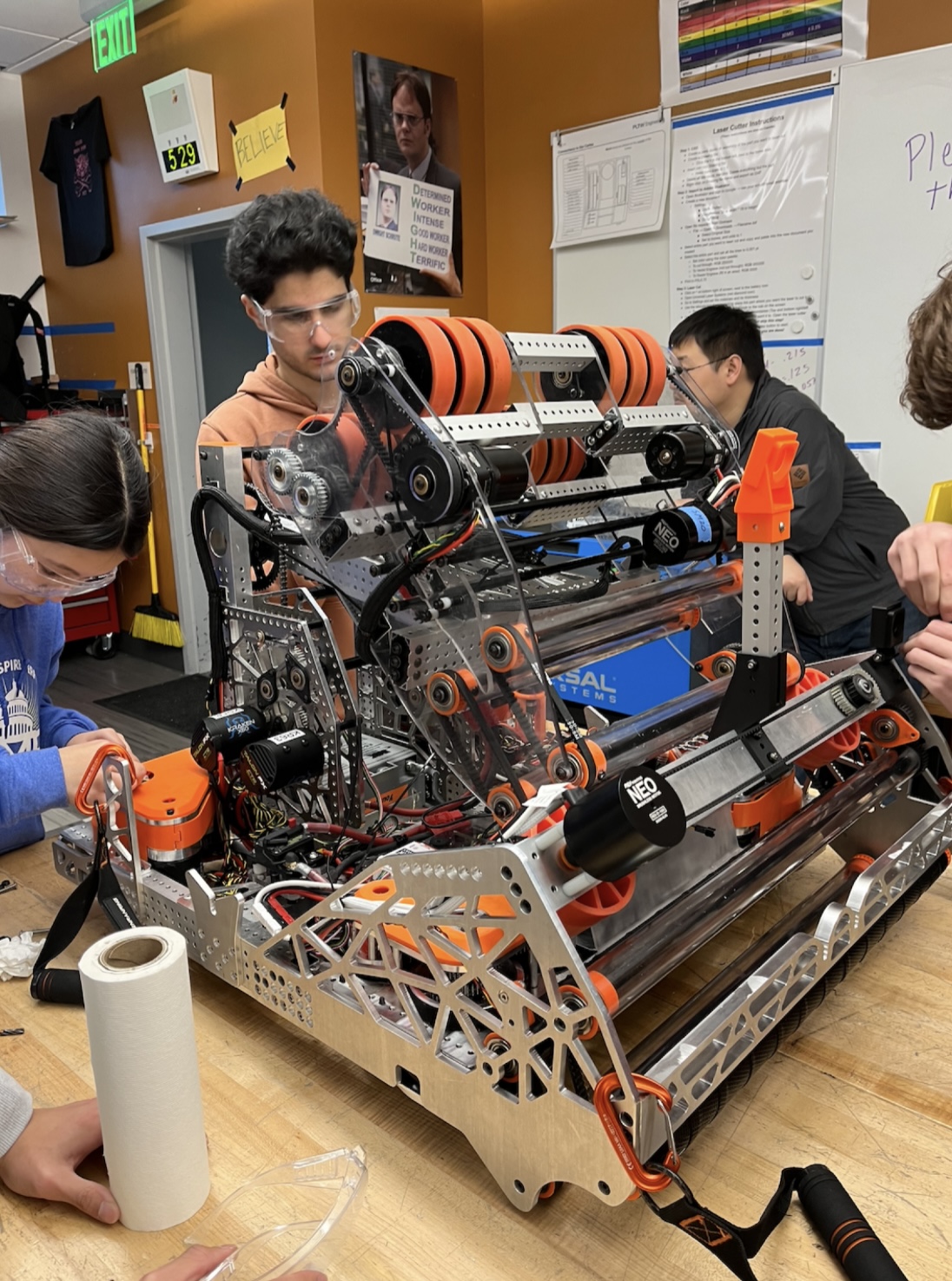
This week, the arm, shooter, and intake have been mounted and wired onto our robot. Our subsystems were assembled separately and, when done, mounted on the drivetrain. We designed around serviceability and ease of understanding in preparation for competition. All power wires were labeled and routed separately from CAN and sensors for clarity in robot inspections, debugging, and replacing of parts. Wire connectors and extensions, for example, are all centralized in certain accessible locations to avoid having to access our protected upside-down control system board.
The programming team has been successful in identifying the initial x and y velocities for shooting while moving (SWM). We can make various test cases, and make them work. We are now working on successfully integrating drivetrain into the test cases by setting drivetrain velocities and attempting to shoot at the actual pose of the speaker.
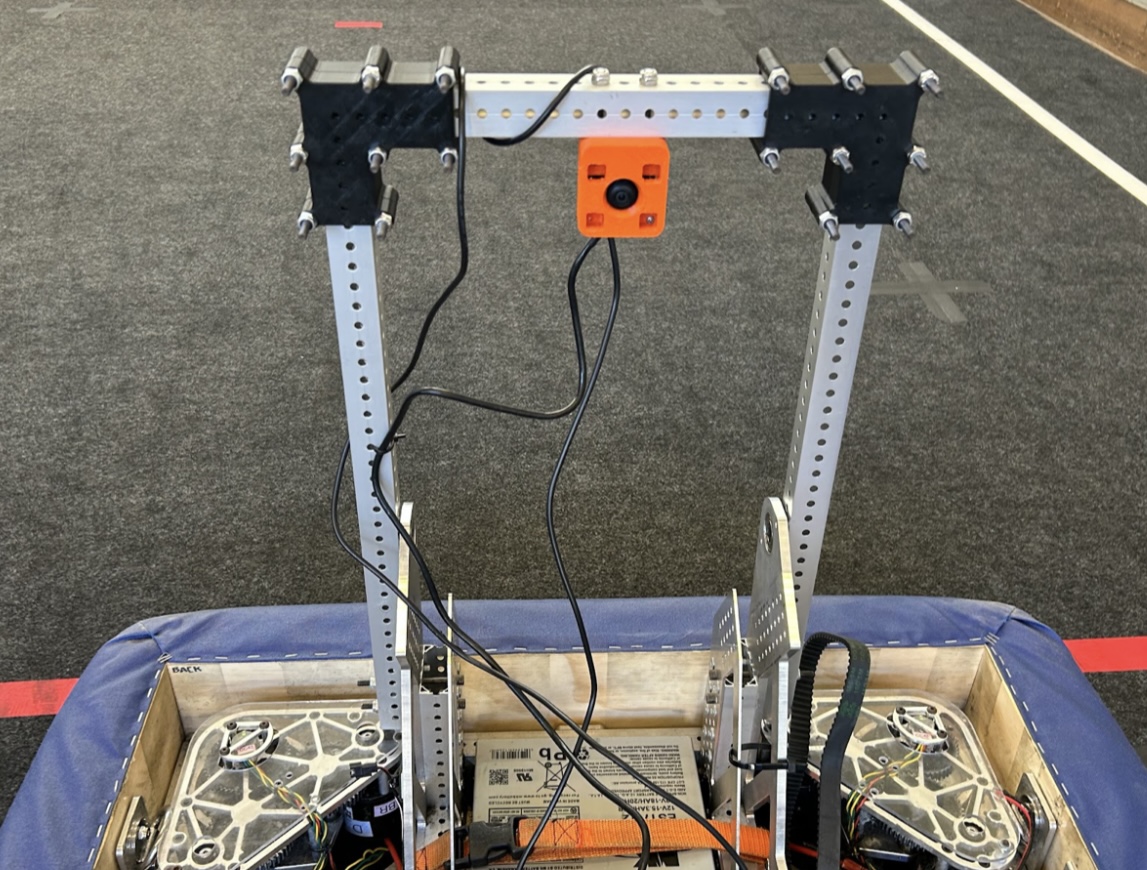
The Vision team has been increasing the accuracy of our computer assisted game piece acquisition. This includes training better machine learning models and fixing the distortion of the camera. We have also been calibrating the camera for photon vision to be used on the April Tags. The CAD team worked on making mounts for the cameras at specific angles when using object detection and April Tags. We have been working on incorporating vision into our auto routine testings.
Our progress on Auto routines have been smooth, especially with the PathPlanner upgrades that make integrating commands easy. We have everything from exiting the starting line, to a three piece auto in all positions that clear out the close-by notes. We also have several paths that go to the center line. While the robot is being finalized mechanically, we are now testing the routines, with great accuracy that will continue to improve as we begin testing with Vision. Our object detection capabilities will help us when opposing alliance members intake our designated piece, allowing us to adjust on the fly and detect another piece in order to maximize the number of trips required. We have yet to test with our competition robot, which is perfecting shooting accuracy. We are excited to finalize our routines and see them in action during SVR.
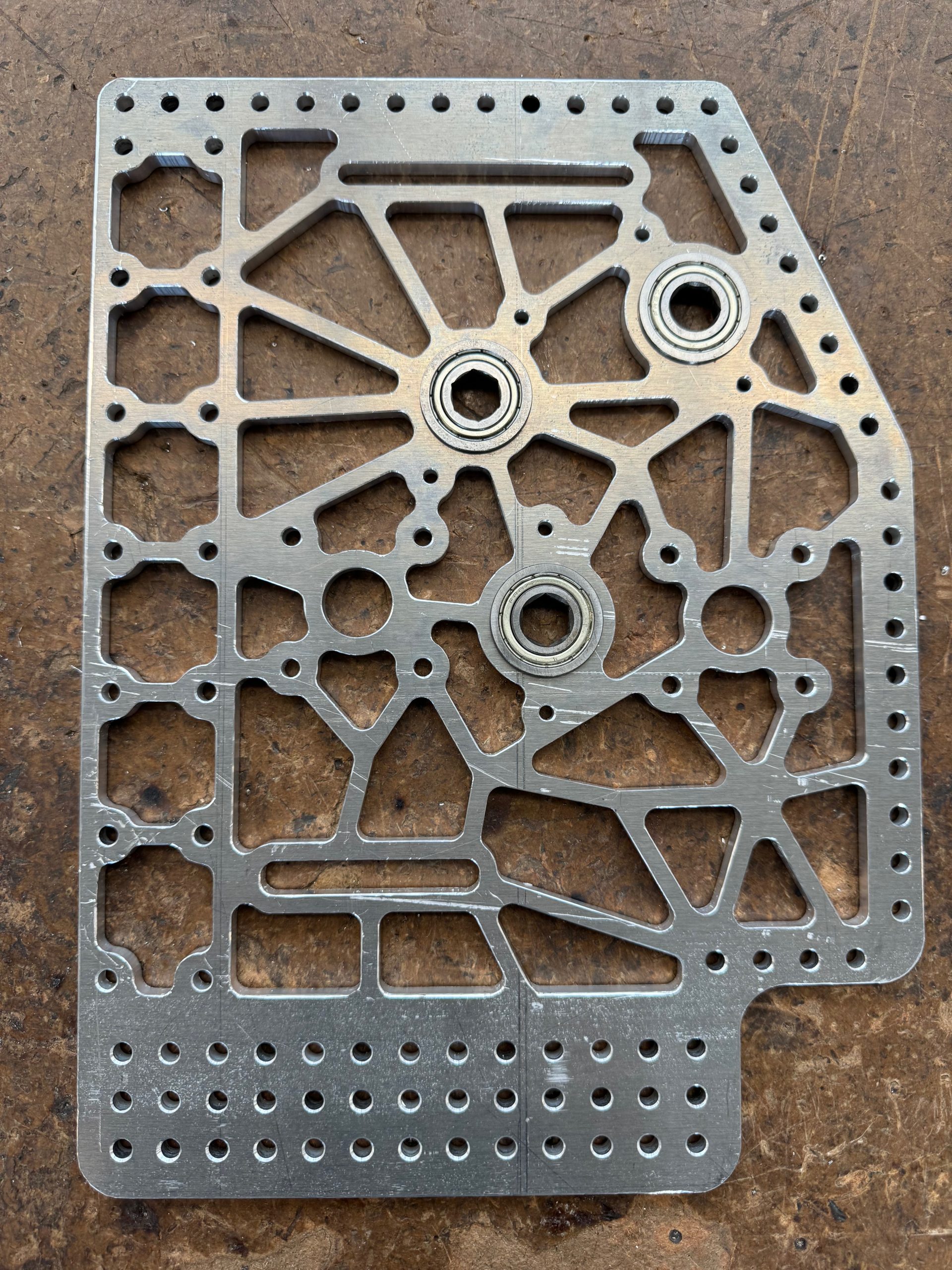
This week, the machinists have worked on machining the intake, shooter, and arm. With the help of Tormach’s 24R router ability to fling chips and first years eager to deburr, we were finally able to finish our machining of major subsystems. With our week one competition approaching, we tapped into the capabilities of the CNC router, bringing down router runtime by fourfold. The intake side plates, which previously took 4 hours to machine now takes 40 minutes. Along with first year machinists on the lathes and mills, machining of the robot took little time. As the week ends, we have begun machining spares and pushing our CNC router to its limits.


The scouting team is finished with the new app, and we are starting to train members on how to use it for the upcoming competitions. Other members will be working on packing the pit and preparing for SVR. Additionally, the remainder of our drive team, strategy team, and pit team has been finalized for competition.
After many weeks, our determined members have put in a lot of effort to create and finalize our 2024 robot. We are looking forward to competing at Silicon Valley Regional this week, and wish the best of luck to all teams!
