

Week three concluded with a DVC (Decision Voting Council) vote on our subsystems. As a team, we extended our prototyping process to ensure that our DVC could use the data and information collected to make an informed decision. We also created an integration team that is responsible for researching possible ways to package and integrate the subsystems onto our 26.5” x 26.5” swerve drivetrain. Below is an overview of how the final prototypes progressed and finished over the week. This year, when presenting the final subsystems, the prototyping teams ensured they validated the capabilities against the functional requirements that the team created in week one.

The Fliptake team finished a CAD of the prototype and simulated the full range of motion. We also worked on mounting it to Phil, our off-season swerve robot, to test its ability to intake while driving. In its stowed position, the two rollers of the Fliptake are positioned halfway across the robot with a polycord infinity loop, allowing spin in opposite directions. Incorporating a self-centering board cements the note to flip back on the pivot and handoff to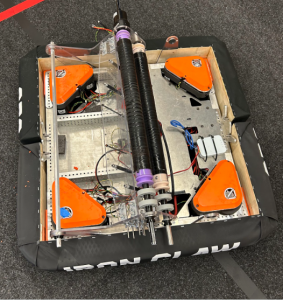 the shooter. However, we found that the self-centering board acted as more of a hardstop for the note. During data collection, we accomplished a 100% success rate during 25 trials from the center using the stationary drivetrain and a 90% success rate during 82 trials when using a moving drivetrain. Additionally, it was able to score in the amp 24 out of the 25 times we tested, with our one error being due to improper feeding.
the shooter. However, we found that the self-centering board acted as more of a hardstop for the note. During data collection, we accomplished a 100% success rate during 25 trials from the center using the stationary drivetrain and a 90% success rate during 82 trials when using a moving drivetrain. Additionally, it was able to score in the amp 24 out of the 25 times we tested, with our one error being due to improper feeding.
The pros that we discovered while building the Fliptake were that it could score in the amp reliably, has a 25.5” acquisition zone to intake pieces, and was able to fulfill our “touch it own it” functional requirement while moving. The lack of an indexer required for the Fliptake could also reduce complexity when handing off the game piece to another subsystem. However, the direct handoff would limit the positioning of the shooter, requiring it to be mounted higher up for the handoff to succeed. Furthermore, as we will mention later, both of our shooter prototypes seem to require a very consistent feeding, which may not be achievable with the Fliptake. This prototype fulfills our functional requirements as it can quickly stow underneath the stage and within our frame perimeter. It also scores consistently in amp, which we considered a “nice to have” feature for our robot.
 The Continuous Intake is similar to the Fliptake, using software to drop down to collect the note and rotate upwards to stow under the height requirements. Like the Fliptake, It also uses a polycord infinity loop to spin. The Continuous Intake, however, uses three rollers instead of two passive wheels for self-alignment.
The Continuous Intake is similar to the Fliptake, using software to drop down to collect the note and rotate upwards to stow under the height requirements. Like the Fliptake, It also uses a polycord infinity loop to spin. The Continuous Intake, however, uses three rollers instead of two passive wheels for self-alignment.
During testing, the ground intake was 100% accurate. We ran into some difficulty with programming and the Neo Vortex and were unable to test the intake while driving, but based on the acquisition ability on edges, it can be predicted that it would do well when driven. In addition to driving tests, we attempted to outtake into the amp using the intake. When going through various testing phases, we found that while the ground intake was unmatched in their final iteration, trying to achieve consistent amp scoring would require changing the geometry drastically.
 The prototype has similar pros to the Fliptake, but the speed of intaking is much faster. In addition, the self-centering device also works better than the one on the Fliptake. It stows below the stage and within the frame perimeter, but it can also intake from the edges very consistently. The Continuous Intake has many perks for integration compared to a Fliptake, due to its smaller footprint and its flexibility when combined with the shooters.
The prototype has similar pros to the Fliptake, but the speed of intaking is much faster. In addition, the self-centering device also works better than the one on the Fliptake. It stows below the stage and within the frame perimeter, but it can also intake from the edges very consistently. The Continuous Intake has many perks for integration compared to a Fliptake, due to its smaller footprint and its flexibility when combined with the shooters.
Of our two intakes, our DVC has decided on using the Continuous Intake after seeing the pros, cons, videos, and versatility of it in action. In addition, the Fliptake’s self-centering mechanism was removed and altered to continuous intake and after seeing its success with driving during data collection, the DVC was set on creating a robot design incorporating the Continuous Intake.
As discussed in last week’s blog, we have two outtakes: the 95-style shooter and the Flywheel shooter.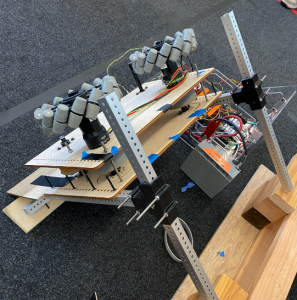
Both outtakes went through various rounds of testing and several rebuilds. The 95-style shooter contained a lot of power from the start, so improving accuracy was the main focus for the team. We found that decreasing the speed increased horizontal error, but decreased vertical error. Conducting several accuracy tests, as depicted on the right, we discovered that consistent feeding and mechanism vibration appeared to be the greatest factors.
When testing the 95-Shooter, we found that it was able to shoot into the trap several times in a row. Although shooting into the trap seems promising, we are still working on making consistency concrete. The 95-style shooter appears to be capable of further growth, as many of the current issues are due to it being an unfinished prototype rather than the inherent drawbacks of the design.
shooting into the trap seems promising, we are still working on making consistency concrete. The 95-style shooter appears to be capable of further growth, as many of the current issues are due to it being an unfinished prototype rather than the inherent drawbacks of the design.
On the other hand, we have our Flywheel shooter, which instead suffers from a lack of power despite having a higher accuracy. Several attempts were made to increase its power, such as adding extra wheels above to increase the moment of inertia. Gear ratios were considered to increase rotation, but the wheels the team had available lacked the friction necessary to actually accelerate the note. Gripper wheels, such as the Stealthwheels, were predicted to provide the traction needed, but the team lacked them. The prototype was able to improve after switching the front flywheels for Colsons, which improved the accuracy to reach within +/- three inches and increased the power output. Our team decided on the 95-Style Shooter over the Flywheel Shooter, as we felt that it had greater room for improvement.
The last mechanism that our team looked at was a subsystem to climb the chain. We prototyped an elevator and a winching arm nicknamed “Big Arm.”

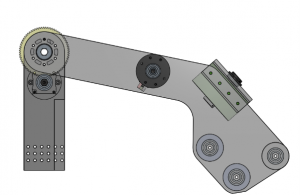
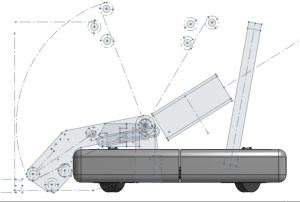
After prototyping the elevator we found a hook style that can allow us to hang and not slide down, dubbed, “Jook,” after the creator and team member Junior Hajin Jang. The design of the Jook contains a divot to prevent sliding, as well as a nub allowing the elevator to hook onto all parts of the chain. We tested the prototyped wooden hooks with weights as they hung on the chain but maxed out at 87 1⁄2 pounds, as we ran out of weights to test further. One idea for integrating the elevator is attaching it to the Big Arm. The Big Arm design is an arm that hooks onto the chain and rotates down to winch up the robot. It’s compact and can have other subsystems around it very easily, with a potential combined Shooter-Big Arm design depicted with the master sketch of the Continous intake.
As shown, it can be easily integrated with other pivoting mechanisms. In addition, it is simple on the software and mechanical fronts due to the pivot only needing to go from hardstop to hardstop.
With all the design options presented to the team, the DVC of leadership and experienced members ended week three with our chosen subsystems: Continuous Intake, 95-Style Shooter, and Big Arm.
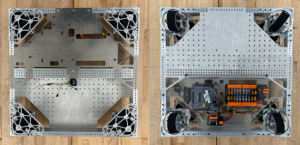
While the prototyping teams were hard at work, the manufacturing team completed the 2×1 drive rails, 2×2 support bar, ¼ battery belly pan, ¼ polycarb control system cover to protect the control system components, and the ⅛ control system mounting board. The control system team then worked on mounting all the control system components, wire management, and labels. The assembly team assembled our SDS L2 Swerve modules, unfortunately without our motors as we are still waiting for our Krakens which recently shipped. The drive rails and support bar were riveted to the belly pan and control system mounting board; we hope to install the Krakens by the end of the week and test the operation of the drivetrain with our drivetrain code.
This upcoming week, our subsystem design leads will be focused on packaging and integrating our chosen subsystems and CADing their final design, while software members will continue to work on auto routines, subsystem code skeletons, and April tag and object detection. This is goodbye for now from team 972, Iron Claw Robotics. Check out our next blog for the full robot CAD and an update on the subsystem components manufacturing and assembly of our robot!