

After last week’s success, we have progressed further on our prototypes, succeeding on many fronts. As a recap for week 1, our DVC (Decision Voting Council), decided on a series of mechanisms that we would prototype and test the geometry for before we decide on our full robot design.
Those prototypes are:
Fliptake: an intake consisting of two rollers on a pivot, allowing it to flip and outtake a note into another subsystem.
Continuous Intake: an intake that brings the note over the bumper into an indexer.
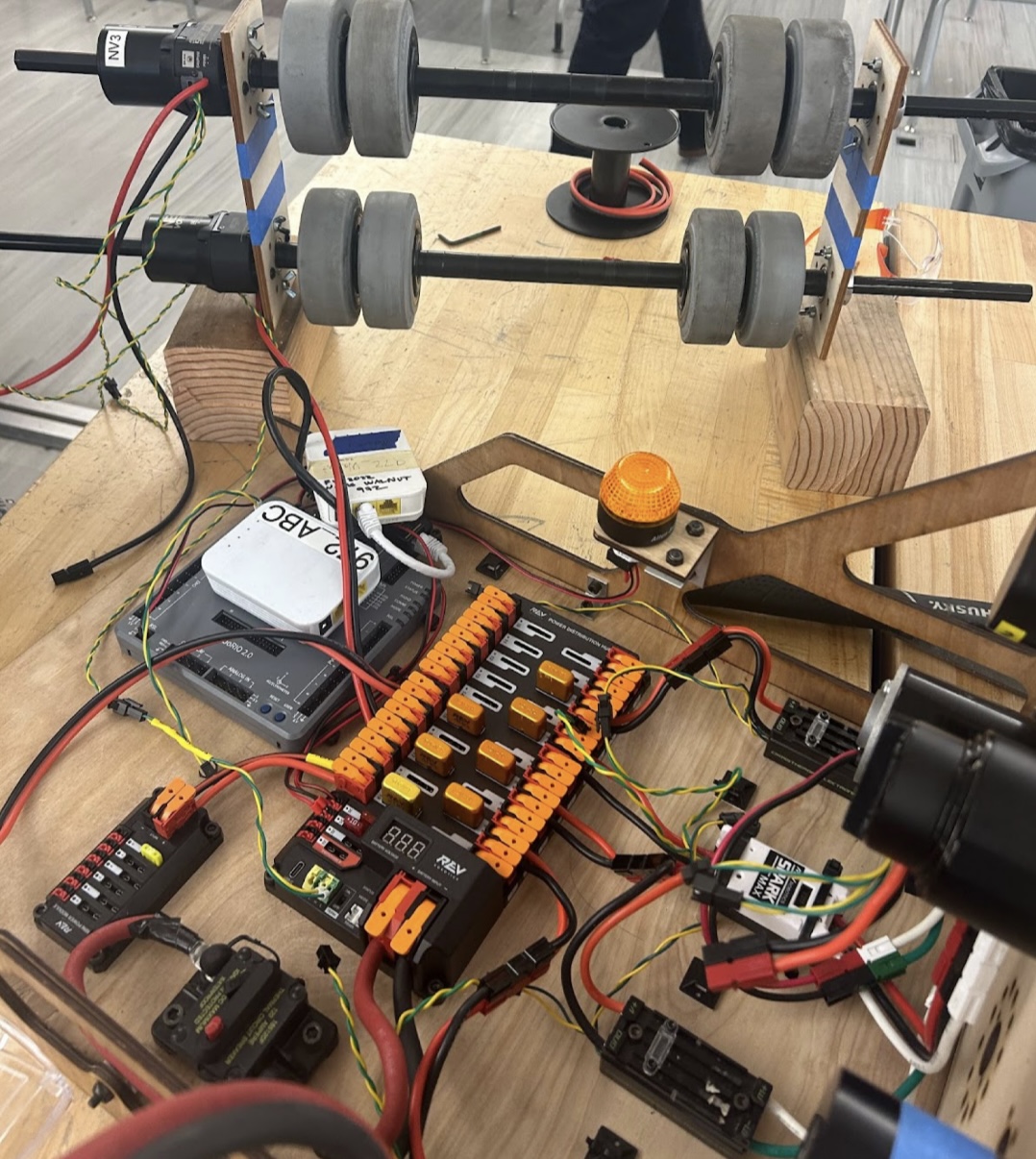
95-Style Shooter: a shooter design where the shooter wheels are vertical and coaxial on 2 axles that vertically compress the note to fire it.
Elevator: a one or two-stage climbing mechanism that may also place a note in the trap on the final robot.
Flywheel Shooter: a shooter that has two shooter wheels that are horizontally mounted which compress and fire a note.
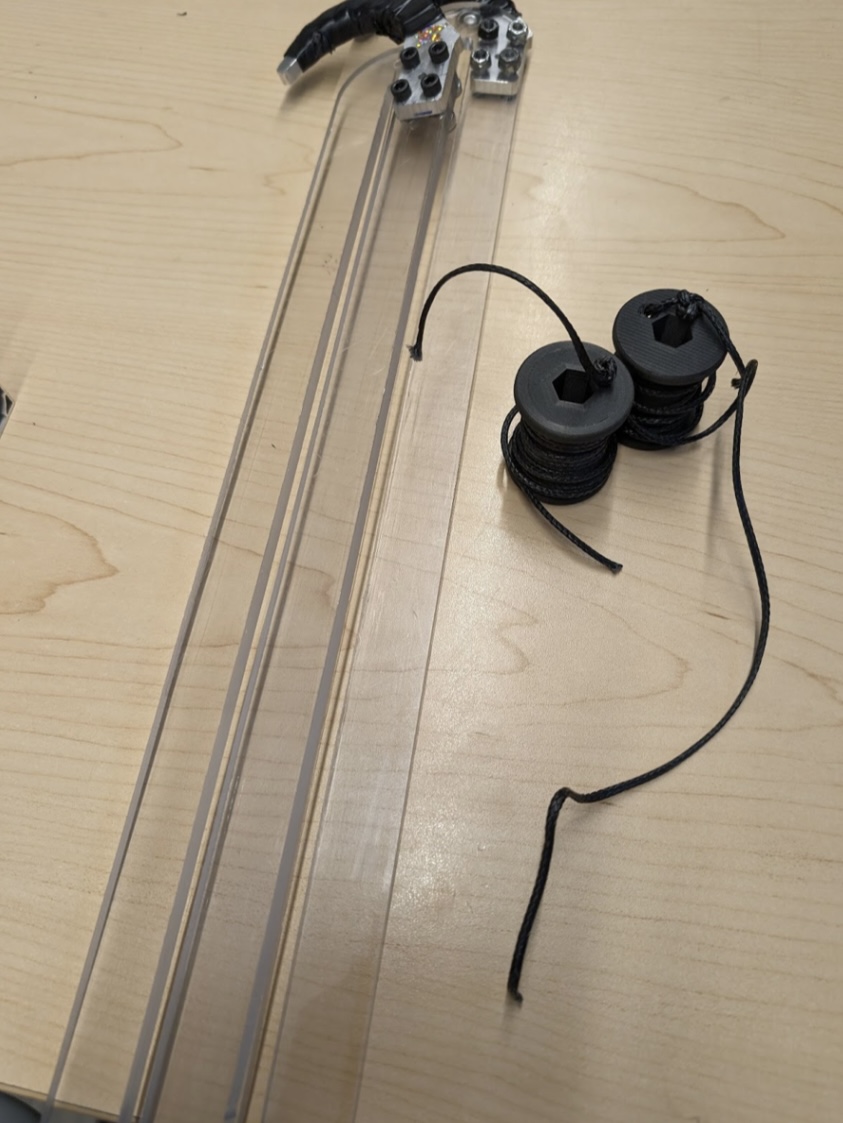
Big Arm: a climbing mechanism that has an arm that winches down onto the chain to climb up.
The prototyping groups are making great progress, they are now focused on collecting data to validate their designs against the functional requirements of the robot.
For our intakes, the Fliptake and the Continuous Intake, we have discussed many options and ultimately decided to put each through second and third rounds of testing. These tests were led by juniors Ian Hsieh and Leo Dai. Ian is our controls system lead, while Leo is a 2nd year on our CAD subteam.
From their research and with the help of their small team of students, they have tested many things from the number of rollers, angles for intake and outtakes, to materials and sizing.
On Ian’s front, the Fliptake has been tested using our 2023 Charged Up robot, “Vertigo”, for easy mounting and dismounting. In version 1, The group added extra bars for support and to help guide the note into the intake, running into both successes and issues. On the note of success, they were able to intake and outtake the note with almost 100% accuracy. On the note of temporary issues, the team found that the robot code needed to be updated since all of the WPI2023 systems have been swapped for the WPI2024 systems. They also discovered that the wrist, which enables the Fliptake to flip, needs improvement, as anything with an extra degree of freedom adds another layer of fragility and complexity. In version 2, they attempted to integrate a self centering device and found that their screw placement and compression was incorrect and worked to fix it. They also plan to swap the current rollers with the sticker roller used on Vertigo due to the fact that more wheels have yet to be shipped and we are struggling to get enough grip without using more gray wheels. Finally, version 3 was assembled at the end of the weekend, switching from wheels to rollers.



On Leo’s front with the Continuous Intake, we tested roller geometry using our polycarb rig, only to find that it could only hold two rollers and was inconsistent. We tested a new geometry with three rollers with great success. Our first iteration was held by hand and we could consistently intake notes. However, we found that outtaking into the amp was more challenging as it required a specific angle. Consequently, we designed another iteration to give our design more stability and to mount it to our swerve module, which would hopefully allow us to outtake into the amp with greater accuracy. Additionally, it would be powered by a motor for consistency between tests. We were able to mount it to the swerve and wire the motor, though we are yet to test it. As we progress to week 3, we hope to implement gears on the prototype that will reverse the direction of the spin in order to outtake the game piece.

On the note of outtaking, for our outtakes, we have two prototypes, 95-Style Shooter and Flywheel Shooter, led by seniors Gavin Tamasi, our Software Director, and Anirudh Warrier, a 2nd year on the CAD subteam.
On Gavin’s front, our 95-style shooter has been completely built. We have been running into issues with our motors and programming as many teams have been experiencing issues with the new Neo Vortexes when attempting to add spin to the mechanism. We decided that trying to use a tilted axle and larger wheels on one side was not worth the extra complexity and found that the note flies well without integrating spin. On Sunday, the 95 Style shooter was able to shoot a note into the trap door, a big success for the prototype team. With the accomplishment of shooting the note into the trap, they will be working on finalizing their prototype to be more consistent and continue to collect data.
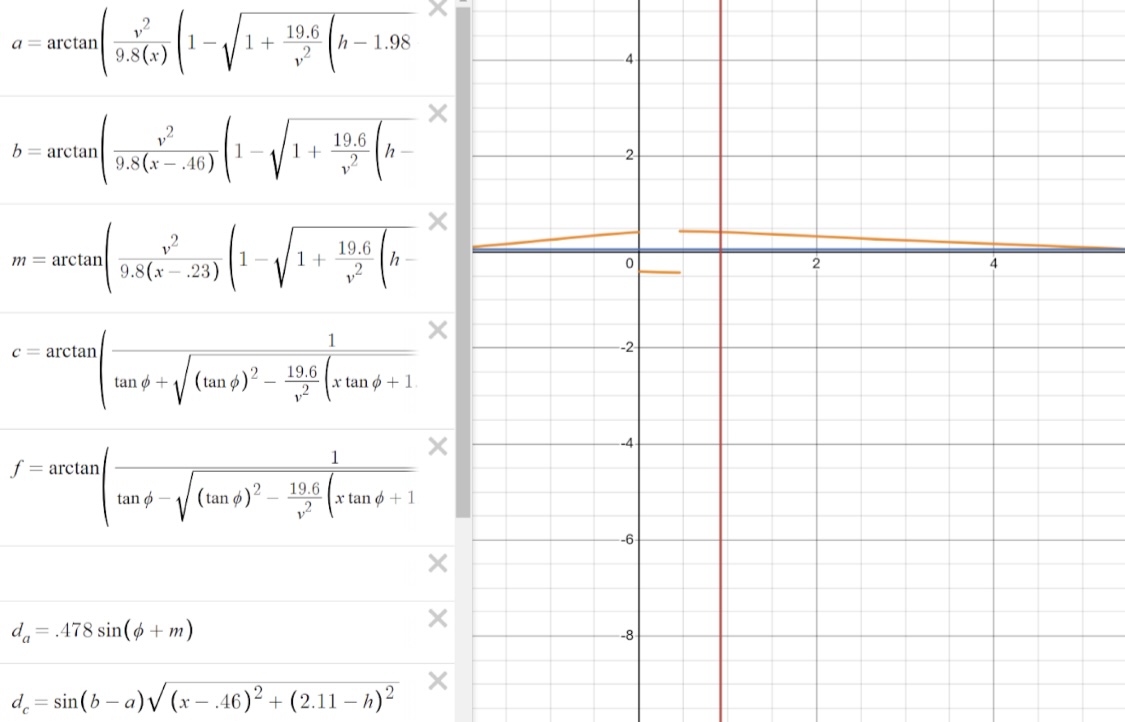
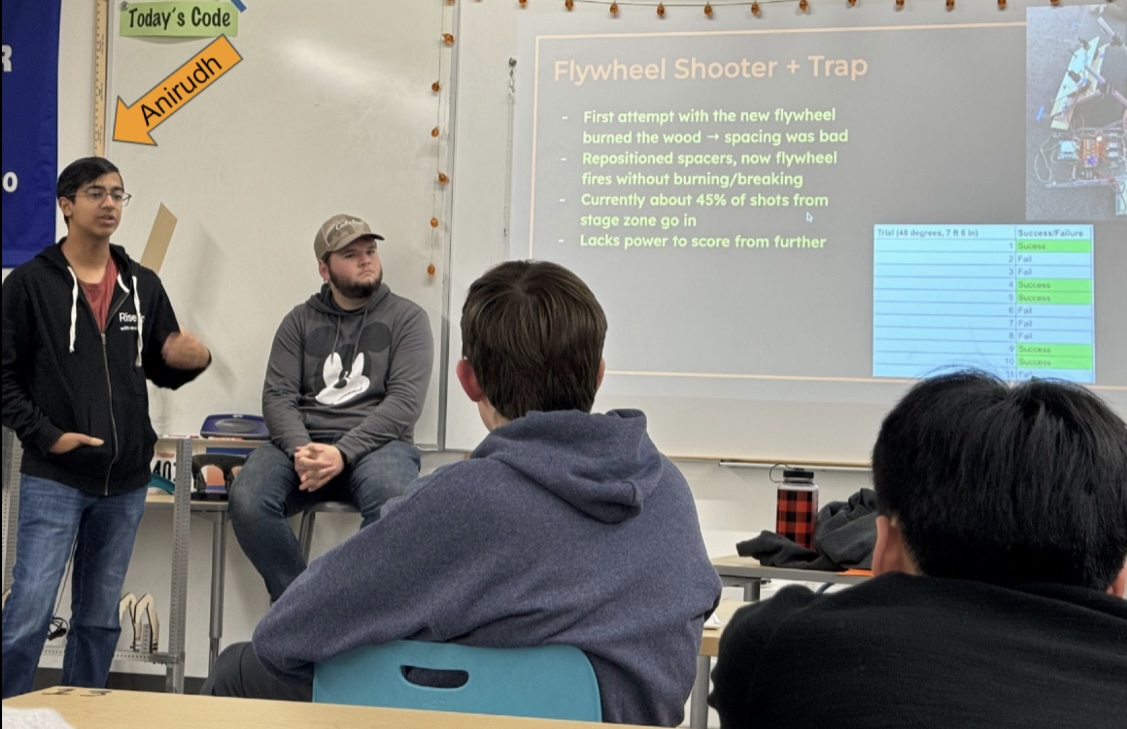
On Anirudh’s front, the Flywheel Shooter has not only been built, but we have been working on the math to find the angle tolerance for the shooter. Over the weekend, the team altered the shooter by repositioning the spacers to prevent the wood from burning or breaking when shooting. Of the students that have joined Anirudh’s prototyping mission, is senior and software lead Benjamin Chen. We were able to get very far and with the help of one of our mentors, Jerry. Together, they were able to create a GitHub animation that allows the user to input various variables such as velocity, distance, height, angle and others to be able to solve the sweet spot in the trajectory to shoot into the speaker. We have decided as a team to aim for a difficult functional requirement, shooting into the speaker from the wing line during auto, approximately 15 feet from the speaker. It is currently operating from 7.5ft because our motors lack the power to shoot further, which we are continuing to refine. It currently has a 45% success rate with 5 of 11 runs scoring into the speaker. As we continued testing, we found that variables such as the speed which the note is fed into the outtake play a role in the success of the prototype. We also discovered that one of the flywheels was shredded during testing, so the team replaced the wheel and added a spacer. So far, we have been testing by shooting at the wall, but we look forward to using the field elements this week for further testing and data collection.

We also have two other prototypes: our elevator system led by our Hardware Director and senior Theadin Bachman and our Big Arm led by our CAD lead and sophomore Kaushik Tadepalli.
Theadin’s team has progressed, but as he and the other seven machinists have been working on creating CAM files and manufacturing the drive rails and a support bar for our 26.5 frame perimeter swerve drivetrain, the elevator prototype has not had too much attention. The team has been able to test various hook types for our other functional requirements of being able to climb and being a second climber on a chain. They were experimenting with different types of hooks we could use with the elevator. One of our new students, junior Hajin Jang, made a unique hook and it works phenomenally. It’s a design based off of a traditional hook, but incorporates some elements from a chain hook with a middle prong. It allows our robot to latch on to the chain and stay steady without sliding, fitting and exceeding our functional requirements. Lastly, the elevator team assembled the mechanism that expands the elevator upwards to hook onto the chain and they utilized weights to simulate the weight of the robot to test how the prototype interacts with the chain. They plan to test different hook geometries for the elevator over the coming week.



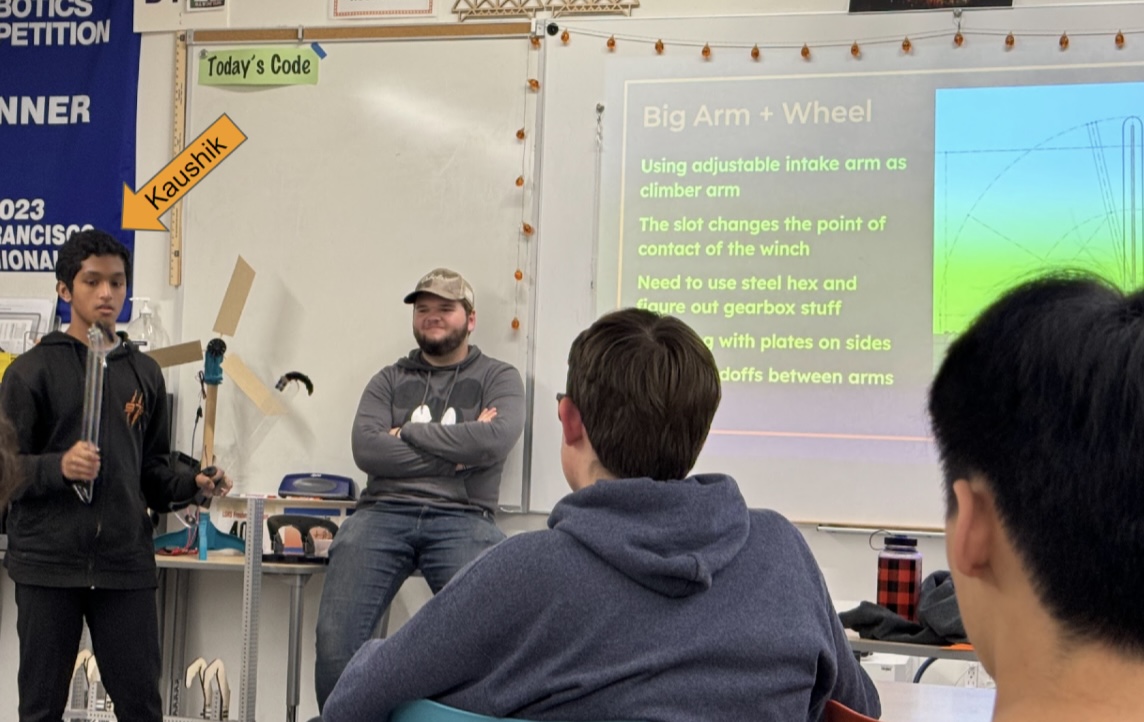
Kaushik’s group has done a lot of research but has not gotten the chance to build the design as the prototyping data has been collected via researching other teams. Kaushik, one of our most knowledgeable students when it comes to FRC mechanisms, has been working on many prototypes, stretching his time a little thin, leaving this prototype on the back burner. However, they did create a prototype and presented a ton of data. As they worked on the assembly of the prototype over the weekend, they are currently working on screwing it into the swerve drive and tying the winch to the top of the arm – ready to start testing the climb.

On the note of presenting, this build season we decided to switch some things up from our previous season. Among our changes are open shop prototype presentations. Our open shops are on three days a week, totaling 17 hours per week. At the end of our open shops, for half an hour, we have a series of presentations from each prototyping group to articulate their designs and learnings from the day’s testing. Not only does articulation of ideas help with presentations for backstage and behind-the-bumpers videos for FIRST, but it catches the members up on the on-goings between the groups. It also strengthens our presenting skills as it is very common in the engineering world to require building something together in ten minutes and presenting it well without a script, furthering our assertion and leadership skills as a student-led team. We plan to continue these presentations during the end of open shops, as well as once a week during our meetings.
On the idea of changes, we have also welcomed a few new mentors this season. Meet Sunny, an FRC Alumni. He was previously a mentor on FRC team 1197, the Torbots, in Torrance California. Sunny relocated to the Bay Area for work and was looking to stay involved with FRC as a mentor. We are thrilled that he reached out to our team. He’s working with our strategy and scouting team, mentoring the team on what scouting data is important to capture to help with match strategy and pick lists.

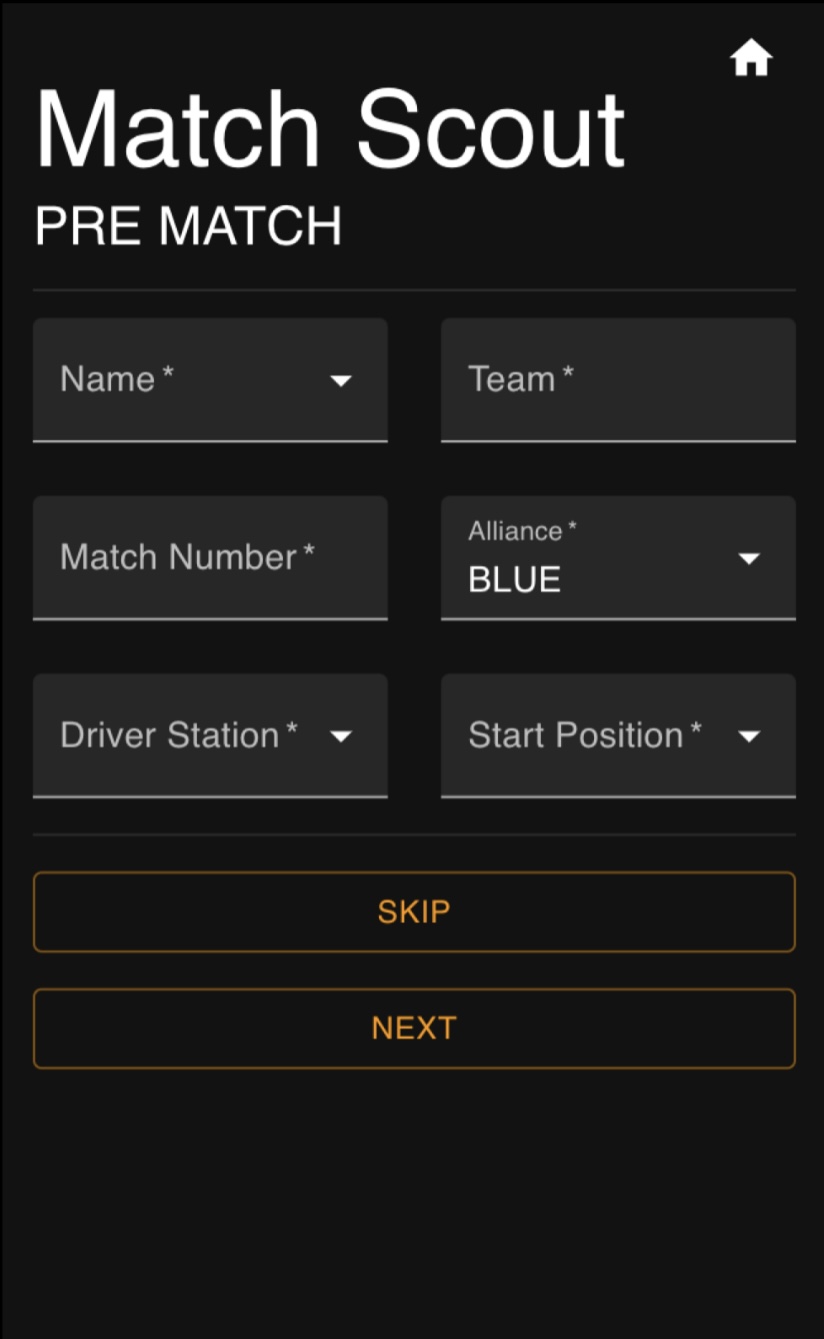
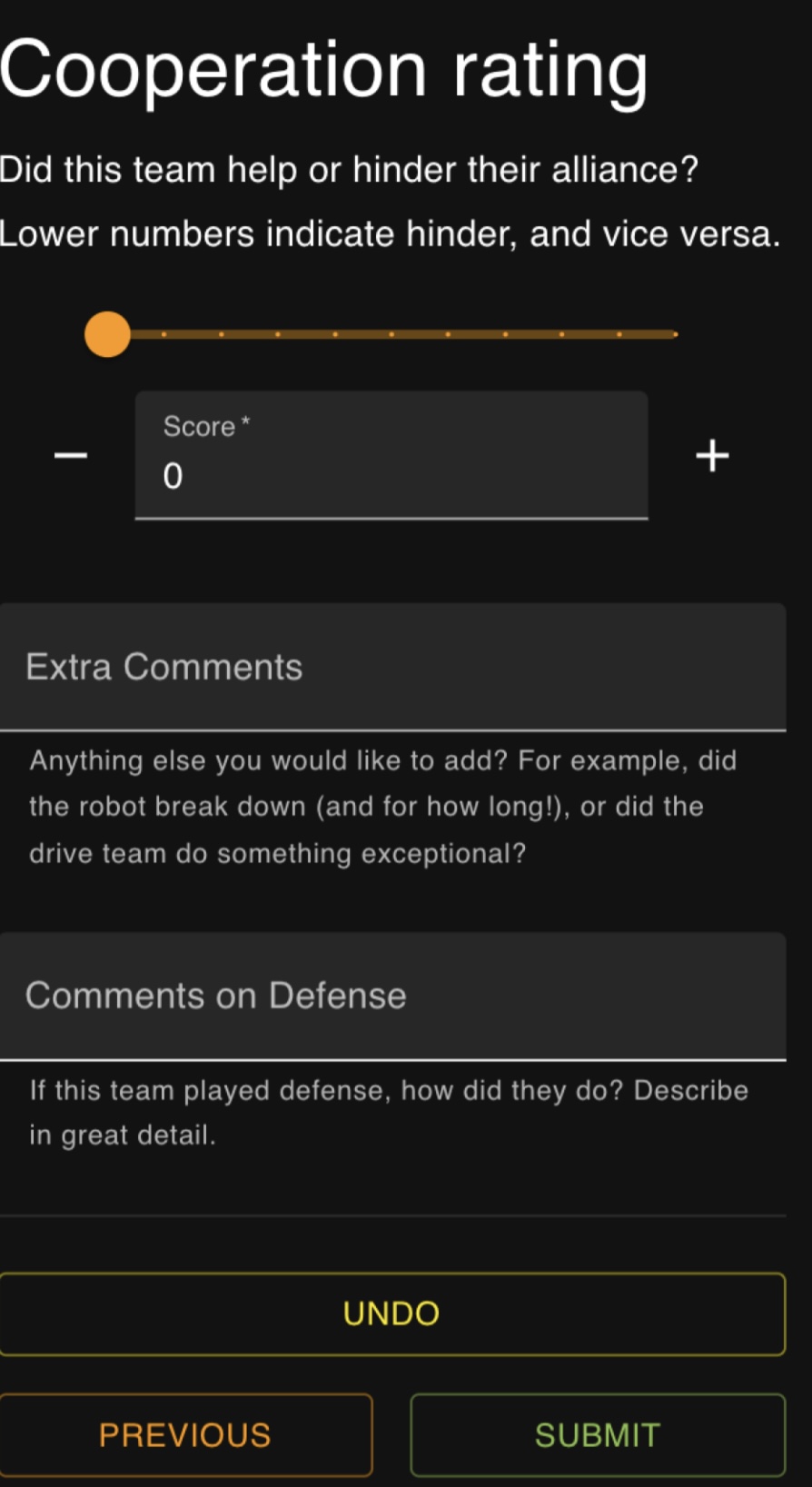
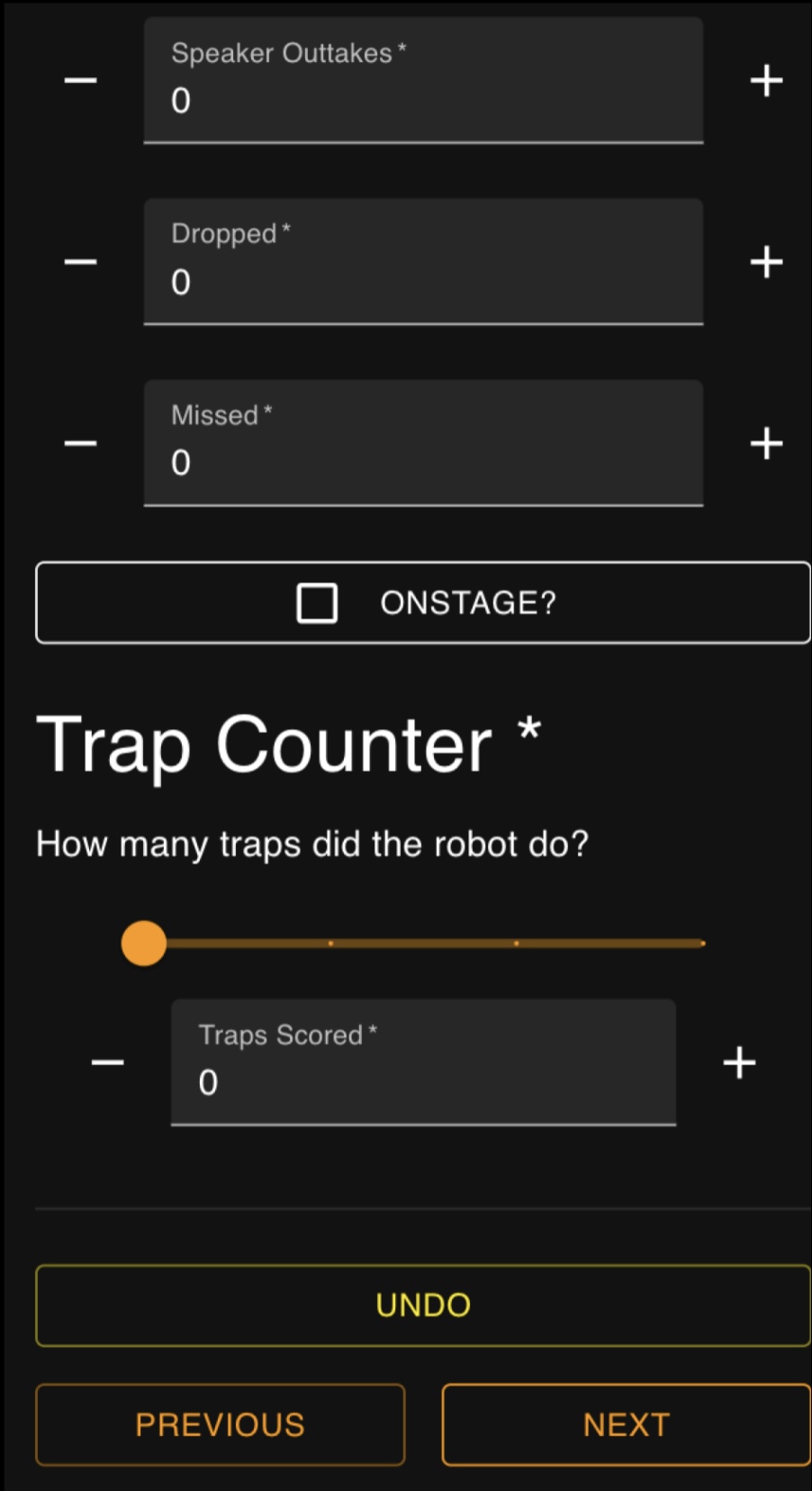
Our scouting app front end was created by senior Tyrus Chuang and Ashir Rao, our team Co-Captain, responsible for the backend data and visualization framework. The amount and strength of our scouting data is something we pride ourselves on team 972, and our app is appearing quite robust.
Tune in next week to see which prototypes our DVC have decided to put on our robot and how the alphabot build is starting. As a team, we have made the decision to continue prototyping until Friday to ensure that our prototypes have sufficient data and that each team is able to maximize their designs. Postponing the final design vote to Friday will help the DVC make an informed decision on what robot design will lead to the greatest success. This is goodbye for now, sincerely Iron Claw Robotics, team 972.