

Build Week 2 was a hive of activity with 5 groups focused on prototyping, while a sixth group worked on our Alpha Bot. A final group of students focused on delivering a competition drivetrain (DT) and control system board (CSB) by Work Day 12.

We mounted a turret onto a spare drivetrain with a hoodless shooter. Using two cameras, vision allowed us to calculate the turret’s position in order to score in the hub. We successfully compensated for robot movement by providing shooting on the move (SOTM) and intend to further tune it, then experiment with a real hood.
We tested a design for linear climb using three sets of hooks, which let us get an L1 climb, but for L2 and L3, we encountered some issues with the hooks not reaching and the tilt of the robot. Our hooks are spring-loaded, which allows them to go from below the rung. We are pivoting the design to a fast L1 climb, as L3 will likely not be point efficient.

We tested our prototype v2 of the windmill climb, and with some human assistance, we got an L1, L2, and almost an L3. We had some issues with the auxiliary arm getting caught on the upright and the plate holding the two arms together bending enough that the robot’s bumpers tilted below the point needed for L3. We have many changes that need to be made for this climb to work, but we know what we are doing to fix them, and it is very promising. With some more work, a sub-5-second climb is entirely possible.
Inspired by the 2017 Robonaut design, we decided to try to prototype a similar indexer. After extensive research and creating the CAD, we began to laser cut and 3D print the parts necessary to assemble the indexer. We got stuck waiting for the 3D printed pulleys, which were initially the wrong size. Until then, we finished putting together whatever else we could. Finally, the pulleys were printed, and we were able to fully assemble the indexer together. Upon our initial testing, we noticed that due to the bending of the wood and the hexshafts, the belts were not tensioned enough and kept slipping off the pulleys. We quickly laser cut simple C-shapes to “extend” the side of the pulley and keep the belts from slipping off, then we ran into another issue: the balls kept jamming. This problem we hope to fix by adding a second belt in the “highway” so the balls will not become jammed. Ideally, the indexer can output 5-6 BPS.

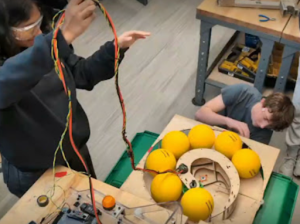
We created a separate index designed to pull balls up to the shooter which we called a Spindexer. While it doesn’t have a lot of inspiration, other teams have also created similar designs to spin and shoot balls up into a supposed shooter, like team 23240. Our final result was a slightly jank but incredibly fast and efficient indexer which was able to output 10-15 BPS. We hope to improve its quality and make sure it can’t destroy itself.
We finished the design of our Alpha Bot and started testing subsystems. The intake works well with one roller and backer bar, and we are continuing with the geometry to the final design. The alpha bot holds 40 fuel and uses a modified offseason 2020 hooded shooter. Despite the lack of an indexer, software has been able to test shooting on the move with the shooter and swerve, and will soon move onto testing the final turreted shooter.

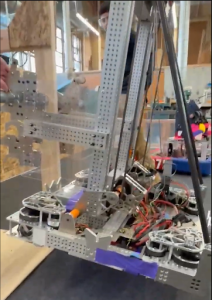
For our competition drivetrain this year, we made it a goal to complete it (have it driving around and all done) by work day 12. For us, that workday 12 was on 1/25. It was an ambitious goal, but we managed to achieve it. We essentially replicated the drivetrain that we made in the off-season, which was based on the MK5N swerve modules from SDS. To achieve our goal, we planned the entire endeavor from the start, and worked on numerous things in parallel to boost efficiency, for example, while our machinists were machining the various rails and plates, we were able to begin work on our control system board (CSB). It was truly a team effort. We ran into numerous obstacles along the way, such as inconsistent firmware, bad QC, and missing parts. We plan to eliminate these issues in the future by creating checklists, subsystem assembly documentation to be used in conjunction with CAD, and by enforcing tighter QC procedures.
You can continue to track our build season progress at our website’s photo album.