2025 Build Season Week 6 Blog
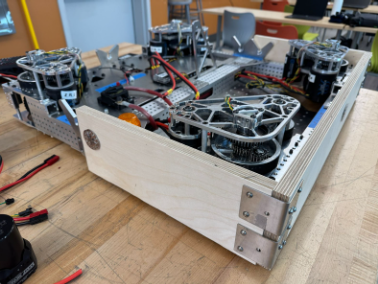
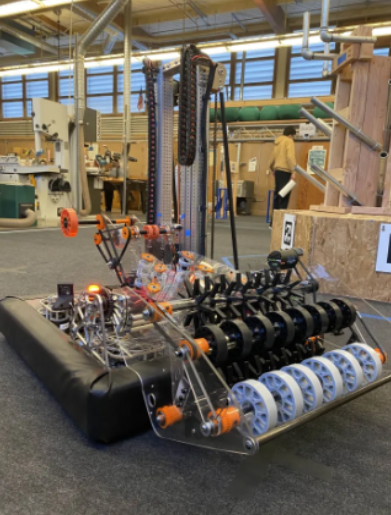
We started the week by assembling the final subsystems of our robot. We mounted and calibrated the elevator, worked on bumpers, began manufacturing parts for our intake and indexer, and mounted the outtake onto the elevator. Meanwhile, our Software team created code for each subsystem to streamline the final weeks of integration testing before our week 1 competition. On Wednesday, we began assembling the deep cage climb mechanism. Our manufacturing team quickly made the necessary parts, allowing the assembly to proceed smoothly. Our Software team also continued refining our intake and indexer code, and our Control Systems team attached the energy chain to our elevator. On Saturday, our hardware team calculated that our robot would be overweight. They immediately brainstormed creative ways to reduce the weight. They decided to switch the Drivetrain rails from 1/8 to 1/16 inch, the Battery belly pan from 1/4 to 1/8 inch with an additional weight reduction grid pattern; the polycarb cover for the control system board was also reduced from 1/8 to 1/16 inch. Manufacturing for these changes began immediately. The upside is the team would now have a beta bot that will be used to test and finetune near-final subsystems, and auto routines, and allow our driver to continue to practice on our practice field while [...]