

Week 6 has ended on a high note, and our team has been hard at work as we continue to build our 2024 robot. As our first competition at Silicon Valley Regional approaches, we need all hands on deck in order to maximize our chances of success!
Over the past two and a half days, the Machining team has made much progress with the intake and outtake. We have been busy machining many hex shafts for intake and outtake assembly. In addition, we used the CNC router to manufacture many plates for intake and have recently started manufacturing for the arm. The Machining team plans to CAM the arm plates, then use the CNC router, all for assembly on Wednesday. We have also been working on the bumpers, assembling and testing them for fit.
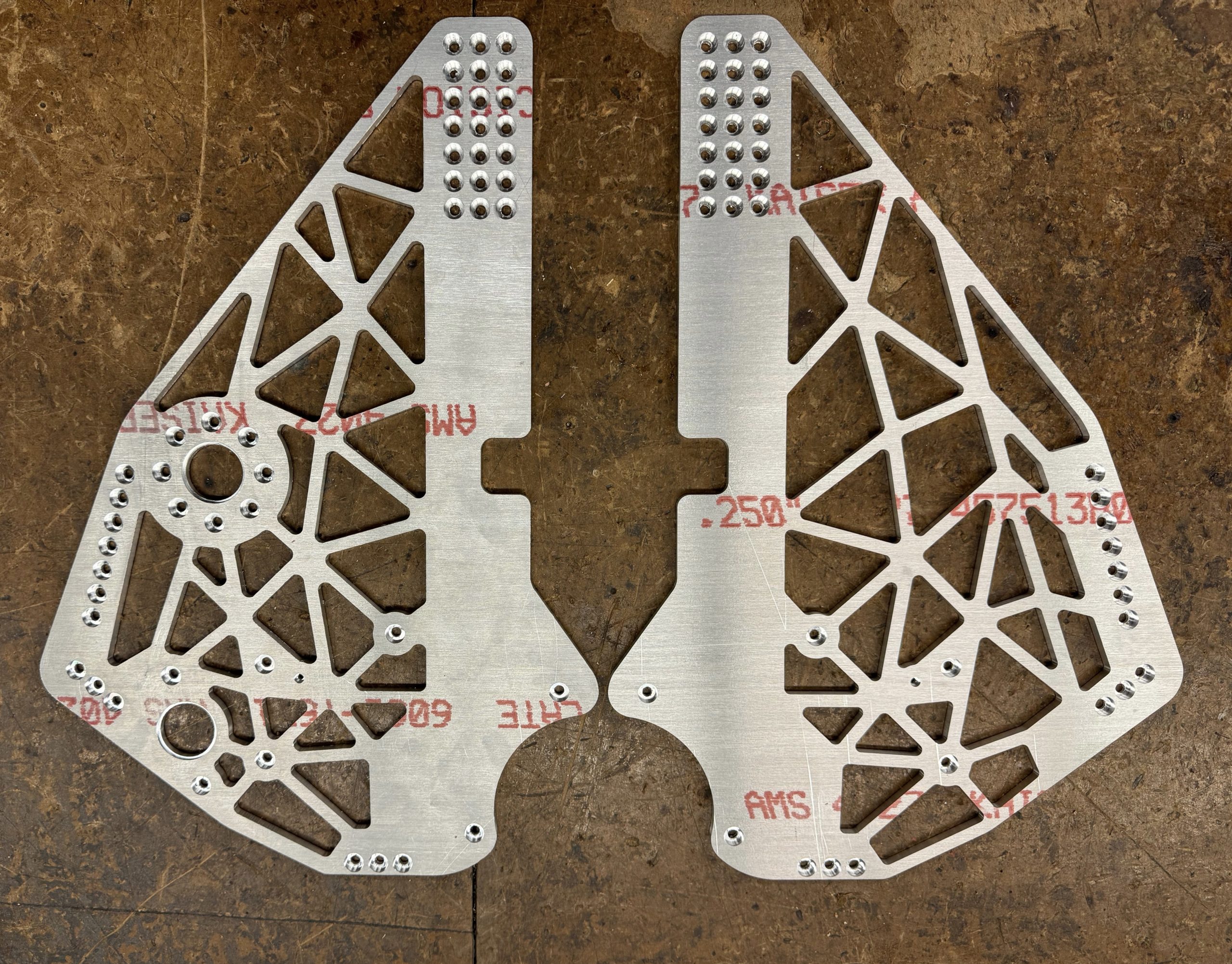
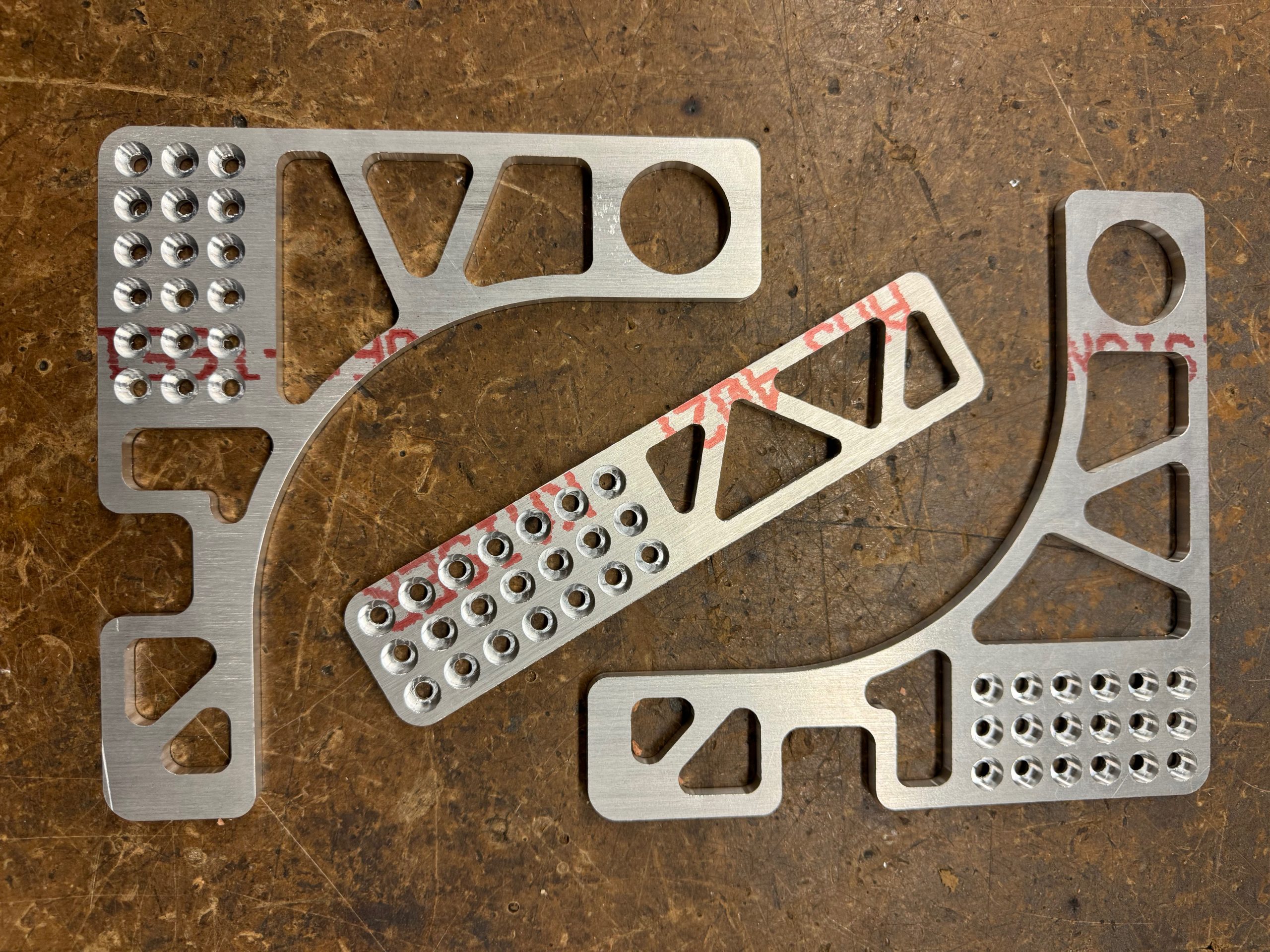
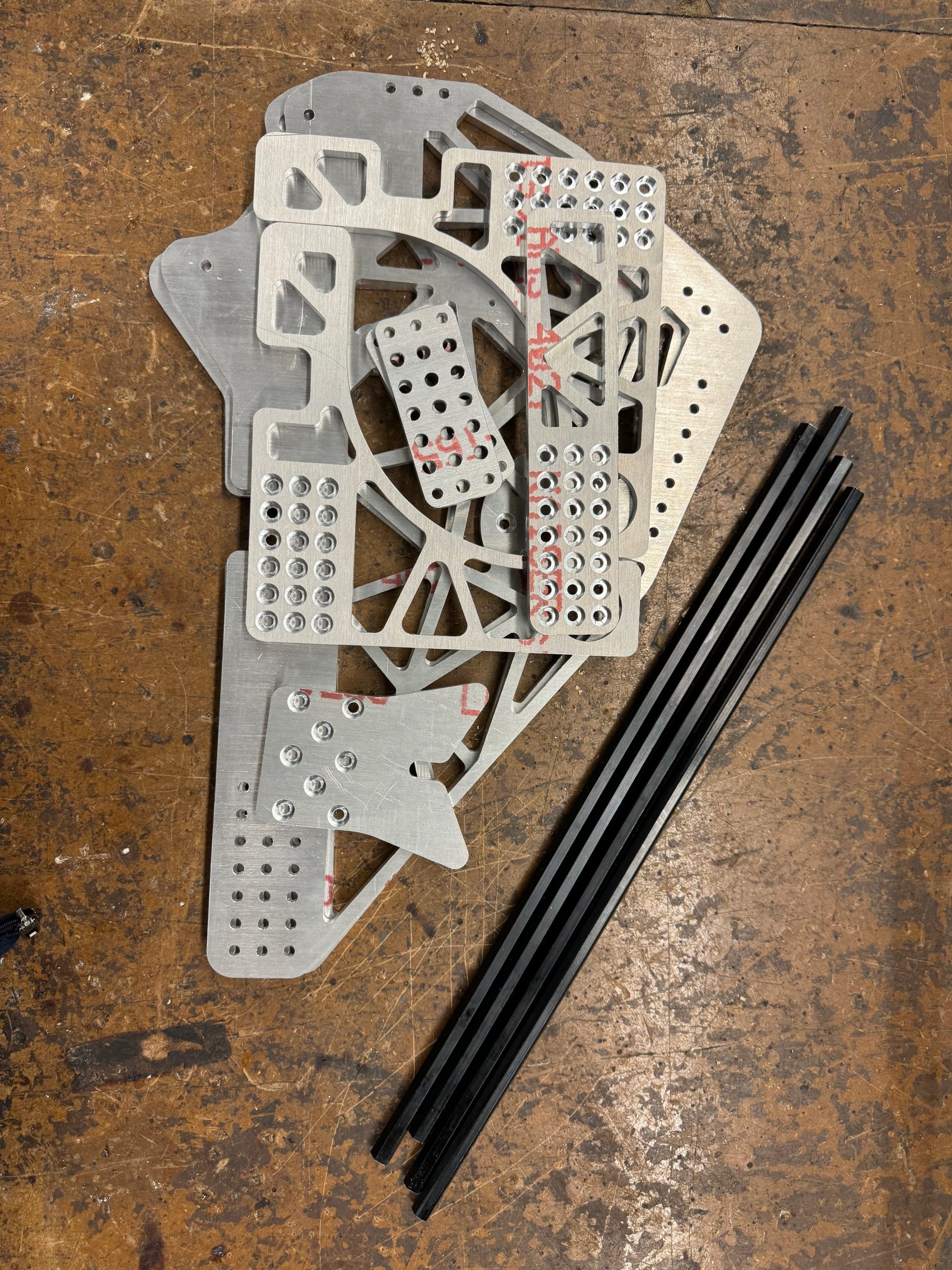
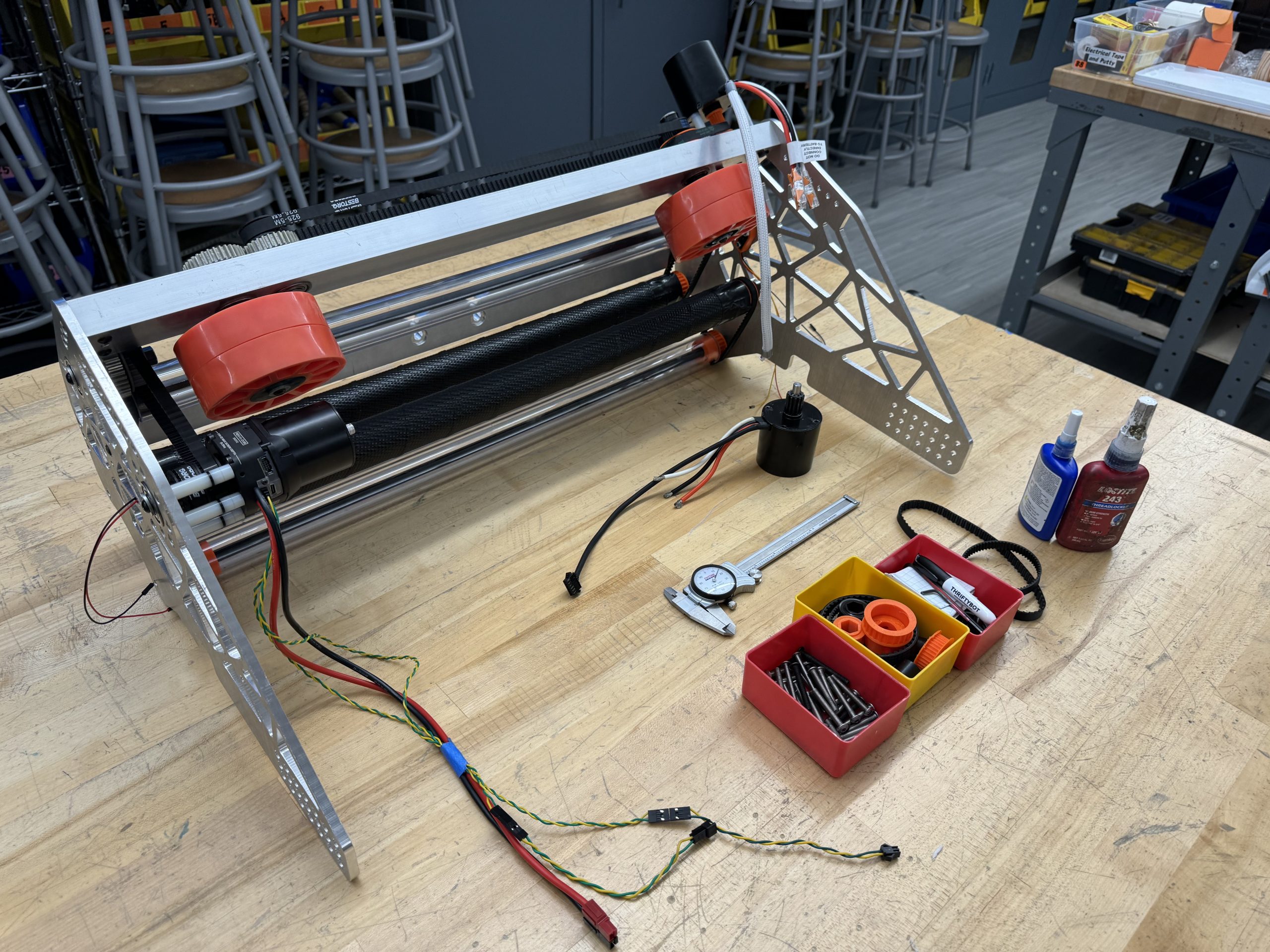
The CAD has been finalized and ready for manufacturing. During the beginning of the week, hardware teams worked on finishing and approving the CAD of the intake for manufacturing, then assembling and testing the intake on the drivetrain. Additionally, the shooter has been assembled and will be tested on its own and then on the arm. The arm is currently being machined, and some key parts are still being shipped, so it will be assembled soon. The CADers are working on putting the finishing touches on the CAD, making drawing files, and filling out spreadsheets for the manufacturing pipeline.
During the past week, the Control Systems team has finished wiring and labeling the Drivetrain, in an effort to increase sourceability. We also constructed a Wiring Diagram, which helps mapping out the electrical as we can visualize where things will go, providing other teams with a wiring source. The team is currently wiring the Intake, as we assemble it to our swerve, and also wiring the shooter. Additionally, Controls Systems members received and tested new Kraken motors and worked on an extra board for additional components: Beelink (for vision), Jetson (for object detection), SparkMAX (for intake motor), boost converters (for powering Beelink and Jetson), and network switch. When the Control Systems team is finished wiring these subsystems, programmers will be able to begin testing.

The Software team is working on code for shooting while moving. Since early on in the season, we knew we wanted to shoot while moving, requiring a slew of difficult 3D Kinematics and research on Chief Delphi from previous years involving SWM. The difficulty that comes from calculating the parameters for SWM with a swerve drive come from the fact that we are not only adjusting the shooting angle, but also adjusting the rotation of the drivetrain (to keep the “moving” part of SWM, we are not touching the trajectory of the drivetrain itself; during the SWM command, the drivetrain will coast in one direction for a short amount of time while rotating). Working in 3 dimensions to solve for 3 variables using mostly constants for expressions makes simplification far more difficult than 2D Kinematics, as it requires delicate trigonometry and very long equations.
We’re currently testing our SWM command to see how the physics translates to robot code, and in the future we will try to account for the aerodynamics of the Note. Currently, the representation of the note in our calculations is a simple point particle, but the Note may have aerodynamic properties worth looking into. Additionally, if the physics from Chief Delphi refuses to work, we do have organic calculations from our Software Data Analytics lead that, while far more convoluted and incomplete, may be simplified and finished by calculating lookup tables before our week 1 comp with brute force.
Other Software members have been working on commands for the drive team game controller. We are currently working on a command that intakes the note, but stops when it reaches the indexer. However, the team must consider certain factors such as jamming, position of the note, alignment of the indexer to intake, and stopping the indexer. By communicating with the driver, incorporating a rumble feature to signal when the note is intake will play a key role in robot performance during competition.
In vision, we continued working on our object detection and acquisition. We fixed our jetson power issue by using a 12V to 19V boost converter. We also started working on improving the speed of our data transmission over network tables. Using Path Planner, we successfully aligned and moved towards a game piece detected by the jetson. Furthermore, we calibrated the new cameras for april tags and began testing them. Since auto and vision go hand in hand, we also made lots of progress with auto. We began testing simple autos (driving around the field going to set points) and are now working on incorporating april tag vision and the intake into our auto routines. Overall our vision and auto teams have made great progress this week!
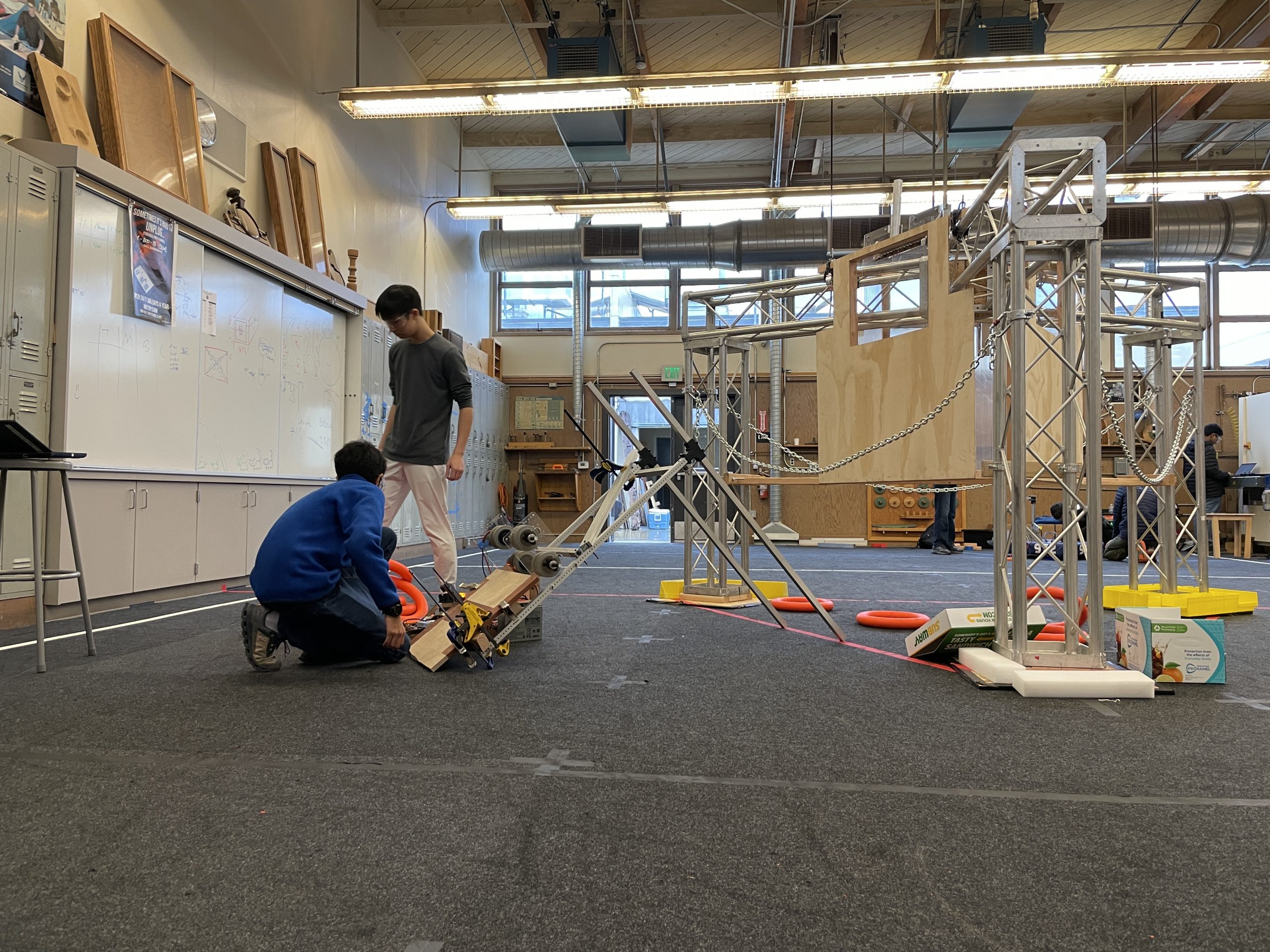
Outside of the mechanical process of our robot, other concurrent events have been in progress. Following our driver tryouts, we have selected our talented and determined driver and operator for Silicon Valley Regional. In order to prepare them as much as possible for the upcoming competition, the driver is practicing on our swerve drivetrain, Phil, and becoming more accustomed to the controls. The rest of the drive team, as well as the pit crew and strategy team for competitions have yet to be selected by the DVC, amounting to about twenty students who will represent our team at the competition.
As another week draws to a close, members will continue to be hard at work during our February break. There is still a long way to go before our robot is finalized, but hopes are high that we will be able to do well at Silicon Valley Regional in the coming weeks!