Build Season Week 2 Blog
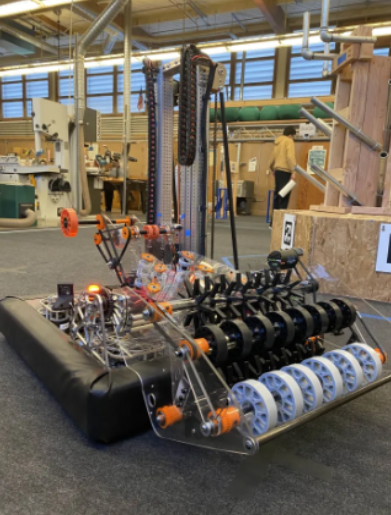
Build Week 2 was a hive of activity with 5 groups focused on prototyping, while a sixth group worked on our Alpha Bot. A final group of students focused on delivering a competition drivetrain (DT) and control system board (CSB) by Work Day 12. We mounted a turret onto a spare drivetrain with a hoodless shooter. Using two cameras, vision allowed us to calculate the turret’s position in order to score in the hub. We successfully compensated for robot movement by providing shooting on the move (SOTM) and intend to further tune it, then experiment with a real hood. We tested a design for linear climb using three sets of hooks, which let us get an L1 climb, but for L2 and L3, we encountered some issues with the hooks not reaching and the tilt of the robot. Our hooks are spring-loaded, which allows them to go from below the rung. We are pivoting the design to a fast L1 climb, as L3 will likely not be point efficient. We tested our prototype v2 of the windmill climb, and with some human assistance, we got an L1, L2, and almost an L3. We had some issues with the auxiliary arm getting caught on the [...]