

Team Iron Claw 972 has had a successful fall season in preparation of the 2024 season, but with several new changes. Our team elected a competition council of 11 members, who led the fall season adopting a task-based approach. Instead of starting the year with a weekend workshop for newer students, the team leadership was able to introduce students to their technical and nontechnical subteams within class meetings, allowing our team to have more time to focus on efficient training.
Currently our fall season training is focusing around a few advanced projects. Those projects are a Turret, Vision programming, Data Analytics for Robot performance, Data Analytics for Match Strategy, and a standard Swerve Drive Chassis based on a 26.5 by 26.5 frame perimeter with a revised and optimized code base for the SDS MK4i swerve modules.
Our team has never designed and integrated a turret onto a competition robot. A turret is a spinning disk and set of gears that allow something such as a shooter to spin a predetermined set of degrees or radians. The turret project allowed the team to spend quality time researching various turret designs from top teams across the FRC community, while teaching the new CADers how to create useful designs for the manufacturing and assembly teams. The team finalized a design and the manufacturing team created the CAM files for the CNC routers. Our senior manufacturing students used the turret project to teach and train our new manufacturing students about G-code, material setup on the various types of manufacturing equipment in the Industrial Technology Machine Shop. This project also involved the control systems team who researched the best approach to wiring control system components around and through the rotating turret. It also allowed training of the new students in physics as there are various tasks that the turret motor must do and to calculate which motor is the most efficient and powerful enough to make the turret rotate with the added weight of a shooter and game piece. Finally, our programmers got involved by writing the code for the turret.

This fall, our vision team worked hard to improve our team’s vision capabilities during a match. The team focused on AprilTags to accurately determine the robot’s location on the field while driving. This will be very useful for the automated portion (autonomous mode) of the competition, but we hope to extend this to the manual driving portion (teleoperated mode), allowing the process of driving and scoring to be as automated as possible with the goal of improving cycle times. In addition, our vision team also worked on object detection using machine learning models. This will allow our robot to detect and automatically acquire and score game pieces during a match. We believe these enhanced vision capabilities are necessary to make our future robots more competitive during match play. Our fall season vision project required a wide range of software skills including Python, OpenCV, Linux, and Machine Learning model research and testing to find solutions that would satisfy the team’s requirements. In order to get this project done, the vision team had to learn many new concepts. Overall, a lot of hard work has gone into our various vision projects, and we are excited to incorporate our learnings into our Crescendo robot.

Finally, we worked on a standard swerve drive chassis with a 26.5 x 26.5 frame perimeter building upon our success with swerve from last season. The swerve drive chassis project allowed many of the subteams to get involved and learn new skills on the hardware and software side. Our new programmers learned the basics of FRC control system programming and what it takes to efficiently program a swerve drive chassis. The senior programmers also led a small team who focused on code structure standardization to improve the onboarding of new programmers and mentors who are looking to assist the team. The senior students taught the new students how swerve modules fit together with motors and gears and how the modules are fitted to the 2×1 drive rails. They also got to learn the printing capabilities of our new Prusa MK4 and Bambu Labs XC1 3D printers.
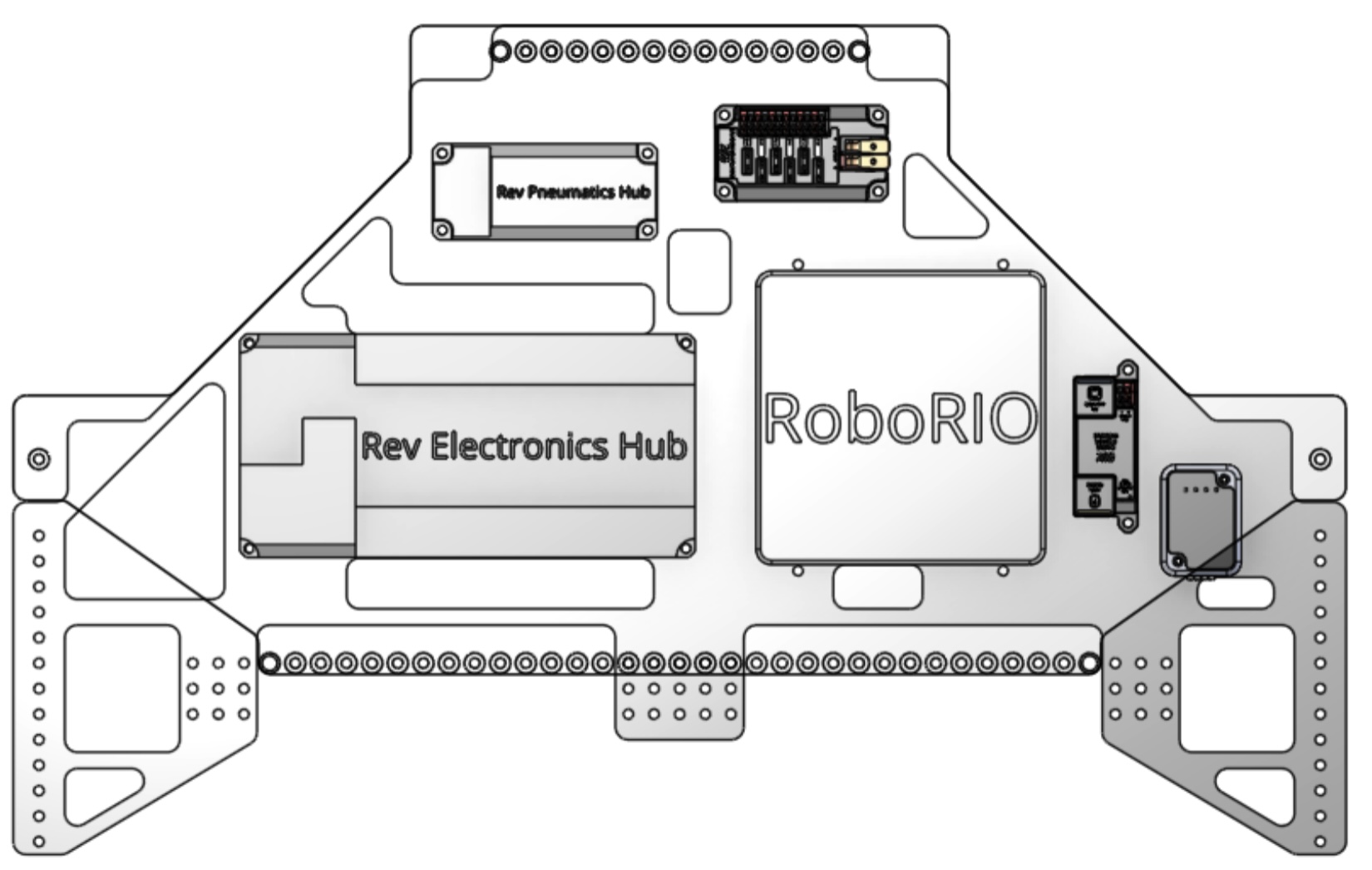
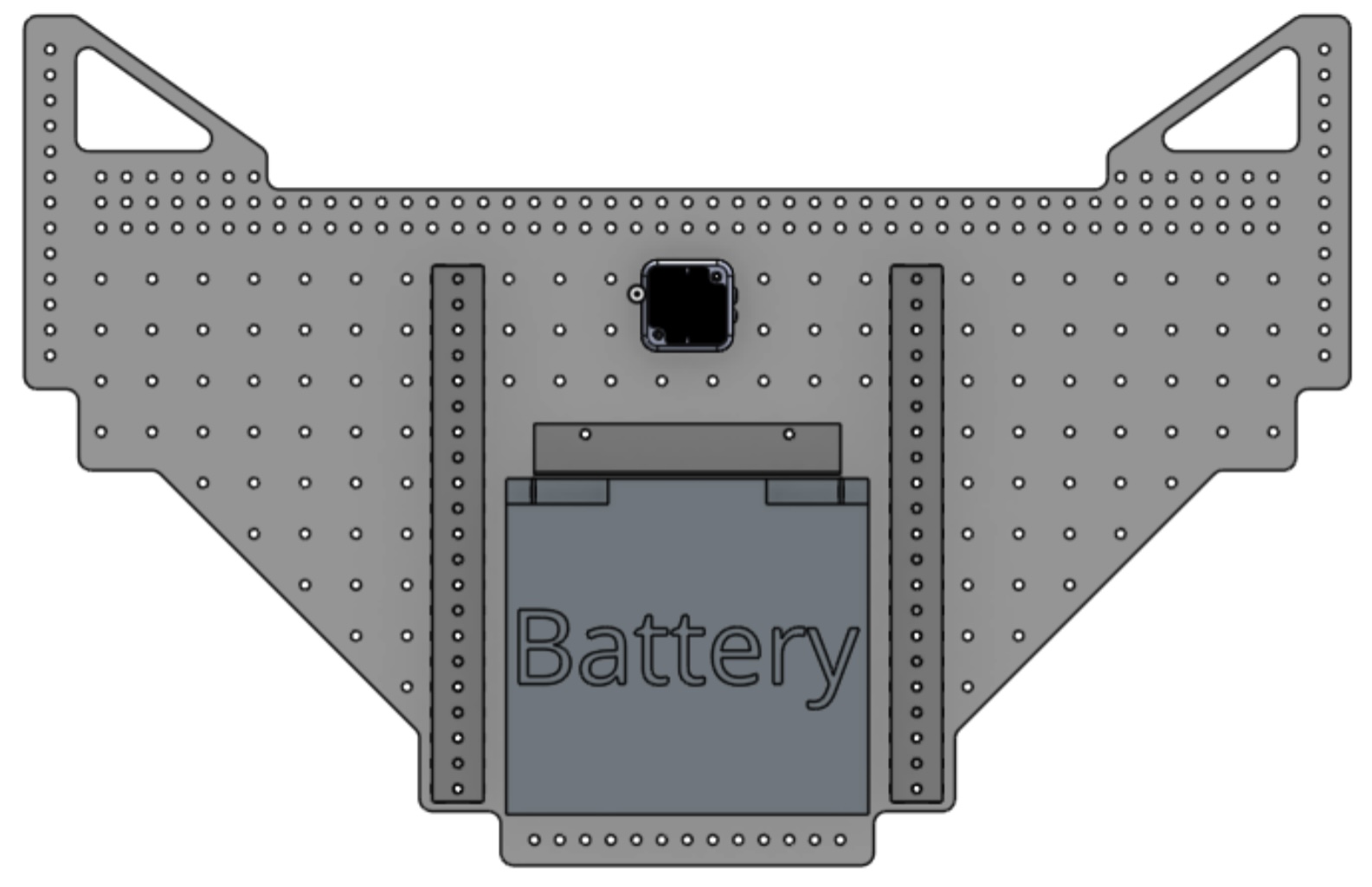
Our control systems subteam worked on a standard swerve control system board to make assembling and wiring up the actual Crescendo control system board more efficient from a time point of view.
Our senior manufacturing students trained and taught our new manufacturing students how to machine drive rails and support bars and the control system board on the CNC mill and CNC router.
Our fall season projects have taught the team many new skills and they are looking forward to applying them during the Crescendo build season. It’s time to put all our training and hard work to the test! Check out the CAD for the above projects here and code samples here.
Team 972 is looking forward to the Crescendo game reveal and competing at the Silicon Valley Regional (Week 1), Central Valley Regional (Week 4) and East Bay Regional (Week 6).
Go Team 972 – Iron Claw Robotics!