2020 Build Blog Week Seven
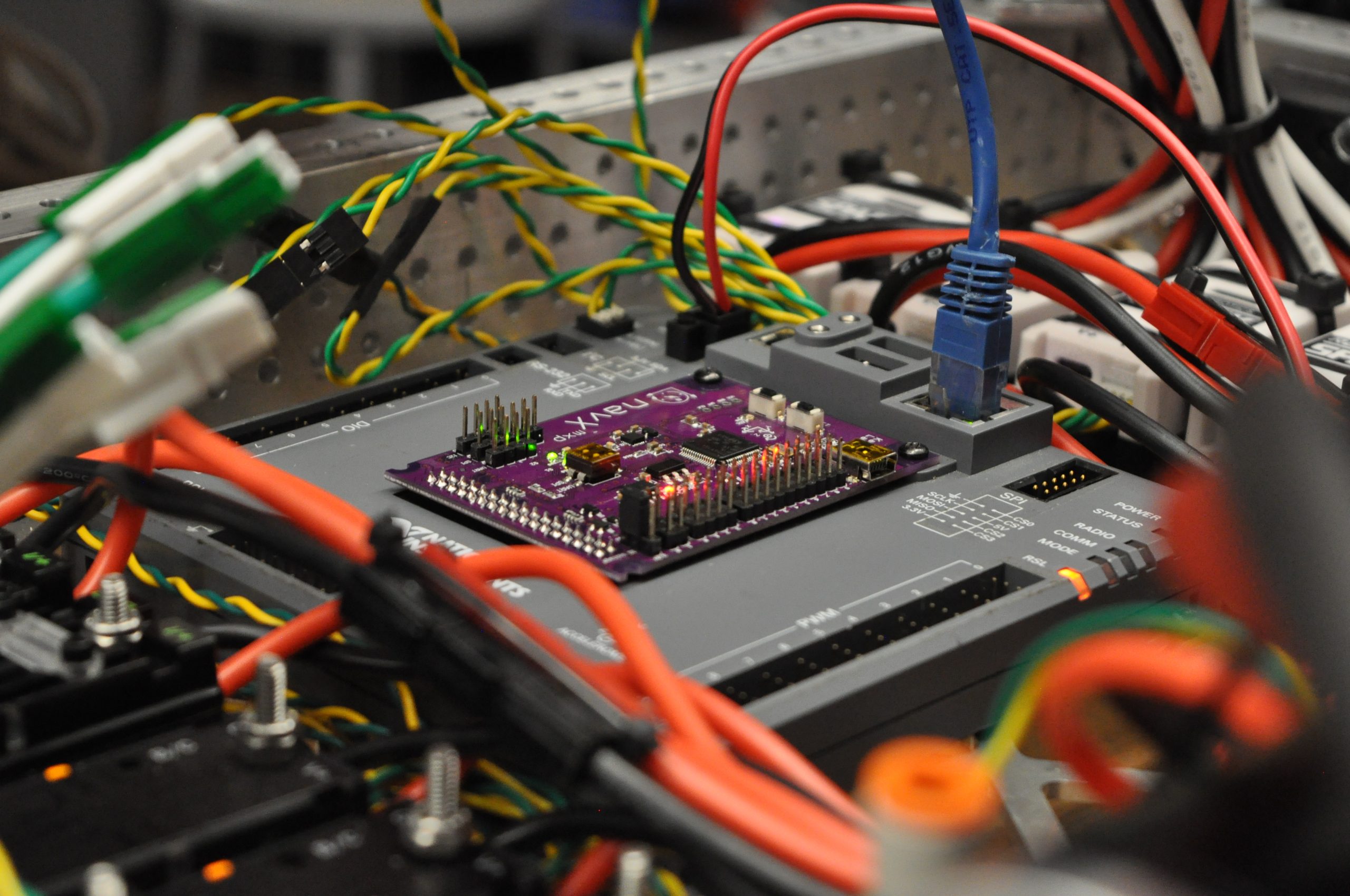
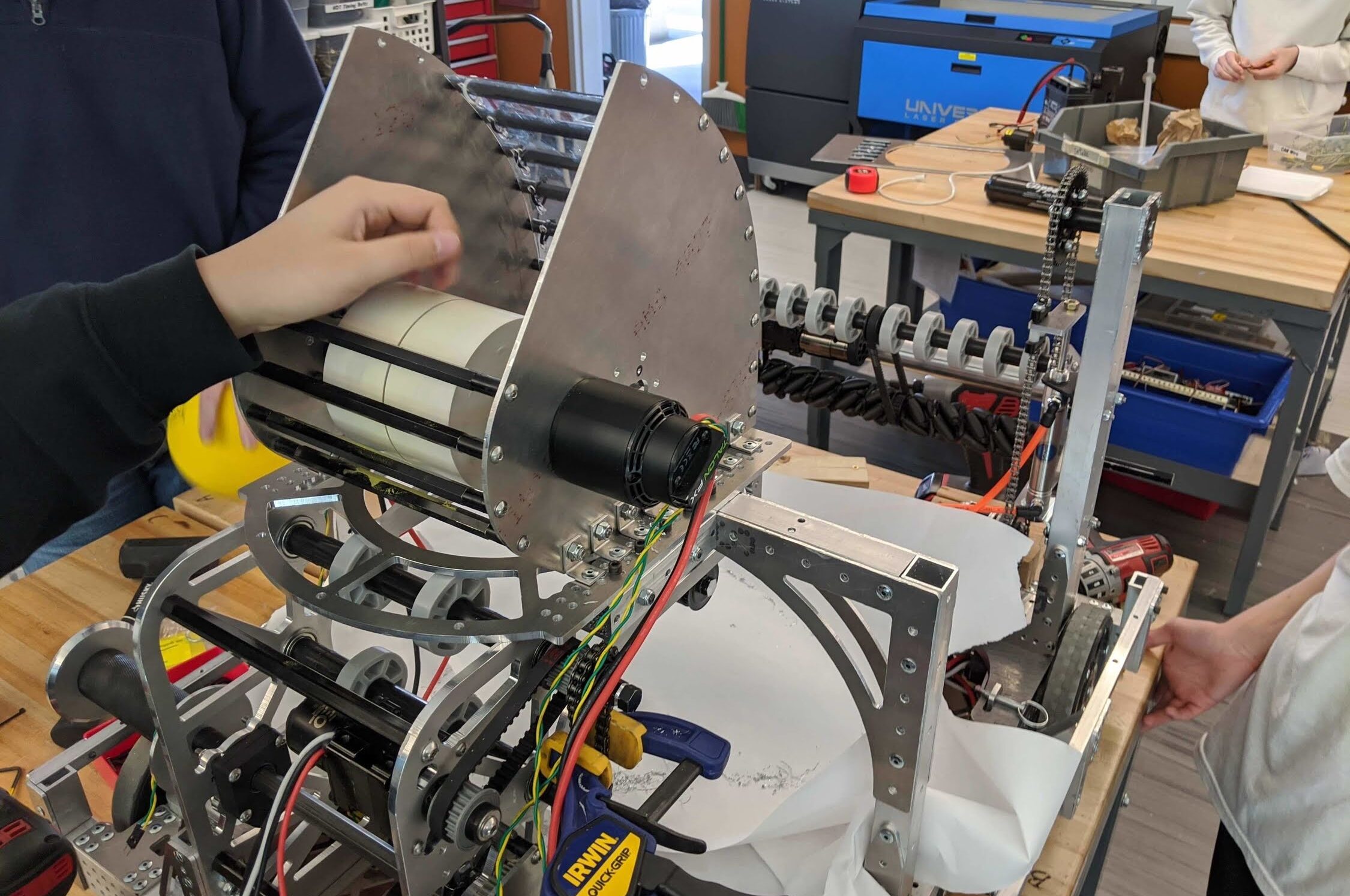
While we did not meet as often as we wish we could, students got together over our February break for a few days and got as much done as possible! Thus, here is our brief blog post. Our mechanical team has been working very hard to put together the rest of our mechanisms. Our intake, indexer, and shooter have now been successfully mounted. Our climb is assembled but we plan to test it on one of our older robots before attaching it to our current one. Our programmers have started rigorous work on our code and we hope to do more work on the sensors we plan to mount. That being said, we have a few finishing touches to do on our electrical board. Our entire superstructure is able to be flipped up, giving our team easy access to the bellypan where all of our components are. That being said, we have begun connecting the motors on our superstructure to our electrical board below. Since the wires must be longer to compensate for the flip up, we are held up because we have run out of wires. Nevertheless, we are excited to hand over a complete robot to our programmers soon, as we intend to finish by March 6. We wish everyone else a productive eighth week! [...]