

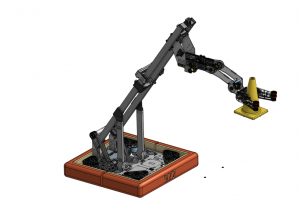
After last week’s decision to use an angled elevator with a 4 bar arm, a layered intake, and an extending bar, a lot of progress was made across all subteams in their respective areas!
With detailed and precise CADs, our angled elevator team opted for continuous rigging over cascade to keep the robot’s center of mass more balanced when extending. As for rigging, they chose to use dyneema rope because it’s strong and light. They decided to use hall effect sensors for the elevator’s position detection: analog sensors for magnet distance and digital sensors or limit switches for stopping. They worked on implementing an energy chain mount, bearing

blocks, and mounting it to the drivetrain. They have also been able to finish their CAD and have started making drawing files, deciding that it would be wisest to first manufacture the carriage.
Our four bar arm team switched from their original design idea of a linkage 4 bar to a virtual 4 bar. They have finished CADing and are now making drawing files for machinists. Our team has also been able to add all commercial off the shelf parts and mechanisms, such as hardstops, sprockets, fasteners, and etc.
So far, our layered intake is successful in intaking cones, but we are still working on cube intake. The cube is not intaking
far enough, stalling the motors, so there may be another design revision needed. The designers of the worked hard to keep the intake/outtake mechanism as light as possible, it currently is around 2.6 lbs.
For the extending bar, we decided to remove the pivoting aspect of the design, as the single substation never outputs an away-facing cone. Our team has also mounted the extending arm to the side rails, added bearings, gear ratios, and a hardstop, and we are currently finishing up the CAD and beginning to make drawing files. Currently the materials and thicknesses for the bar are still to be decided, which need to be impact resistant and extendable to a minimum of 24-25 in.
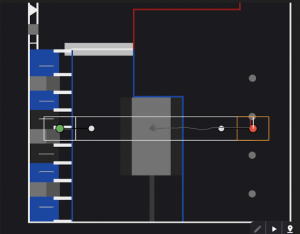
In other news our electrical team has removed the pneumatics hub and replaced it with an ethernet switch, which they have mounted and tested. They are currently working on planning out the elevator assembly and wiring and finalizing the battery side of the bellypan.
Our Auto Pathing team has been working on a few autonomous paths that our robot can take and has a few ideas as of now.
Our programmers are currently making progress on subsystem programming, swerve, AprilTags, and scouting. The subsystem programmers are working on mechanical subteams to figure out how they want their subsystems to work, what sensors to use, etc. We still need to figure out how to calculate the distance from the elevator to different

The Swerve team has finished with the Swerve Simulation and are continuing to write tests, while Game Piece Programming is working on skeleton programs. The Scouting team created a Match List and Display, Auto Map clicker, Team Lookup, and added QR compliments. Finally, The Vision team has received a better mount for the first camera and installed a second camera. There is still some difficulty in using the two cameras simultaneously, and the second camera needs to be calibrated.
Our driver tryouts are starting today, and the results will come out in Week 5.
To conclude, Week 4 was very productive and we look forward to more development in the coming weeks!