2024 Build Blog Week Seven
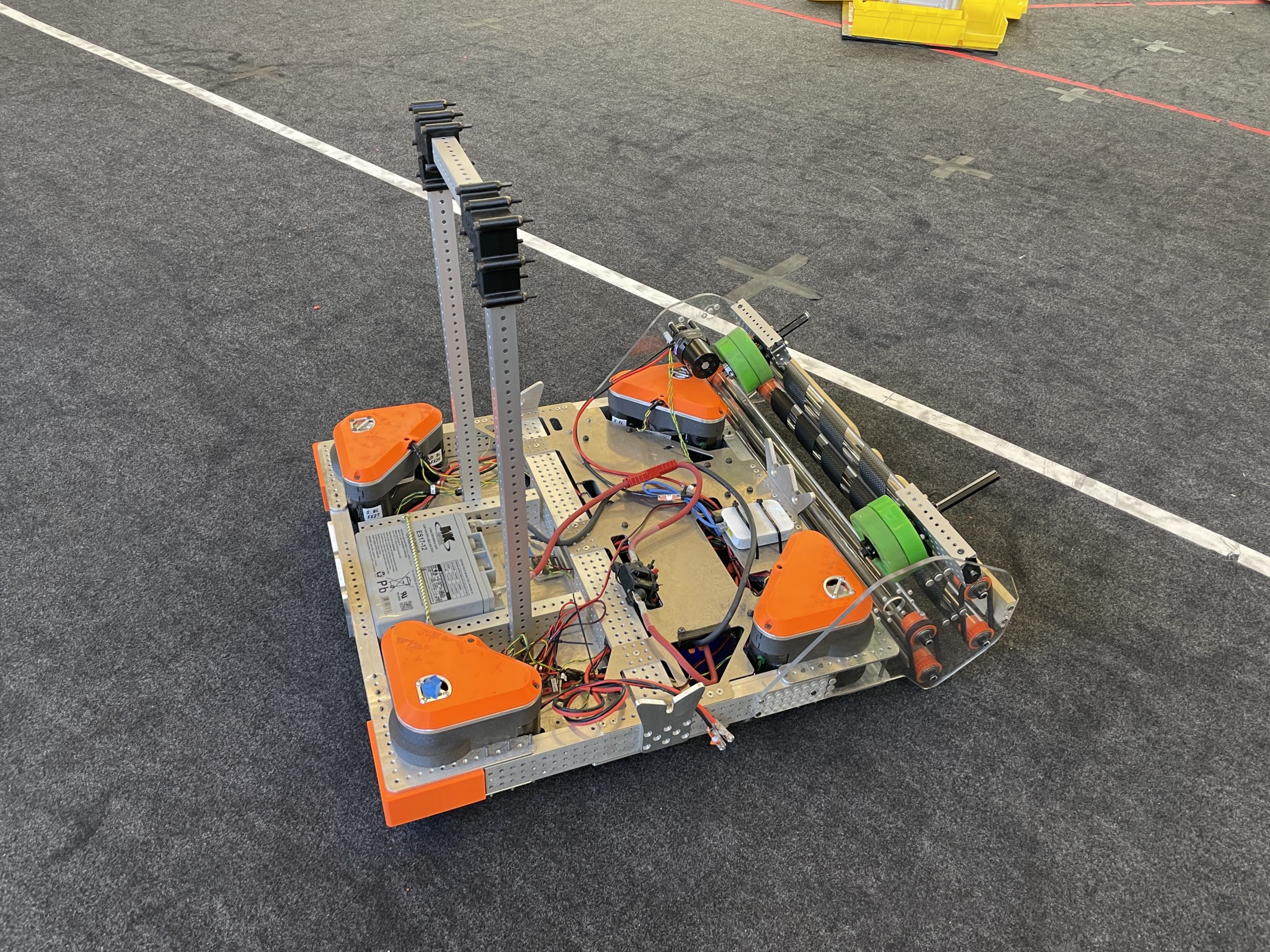
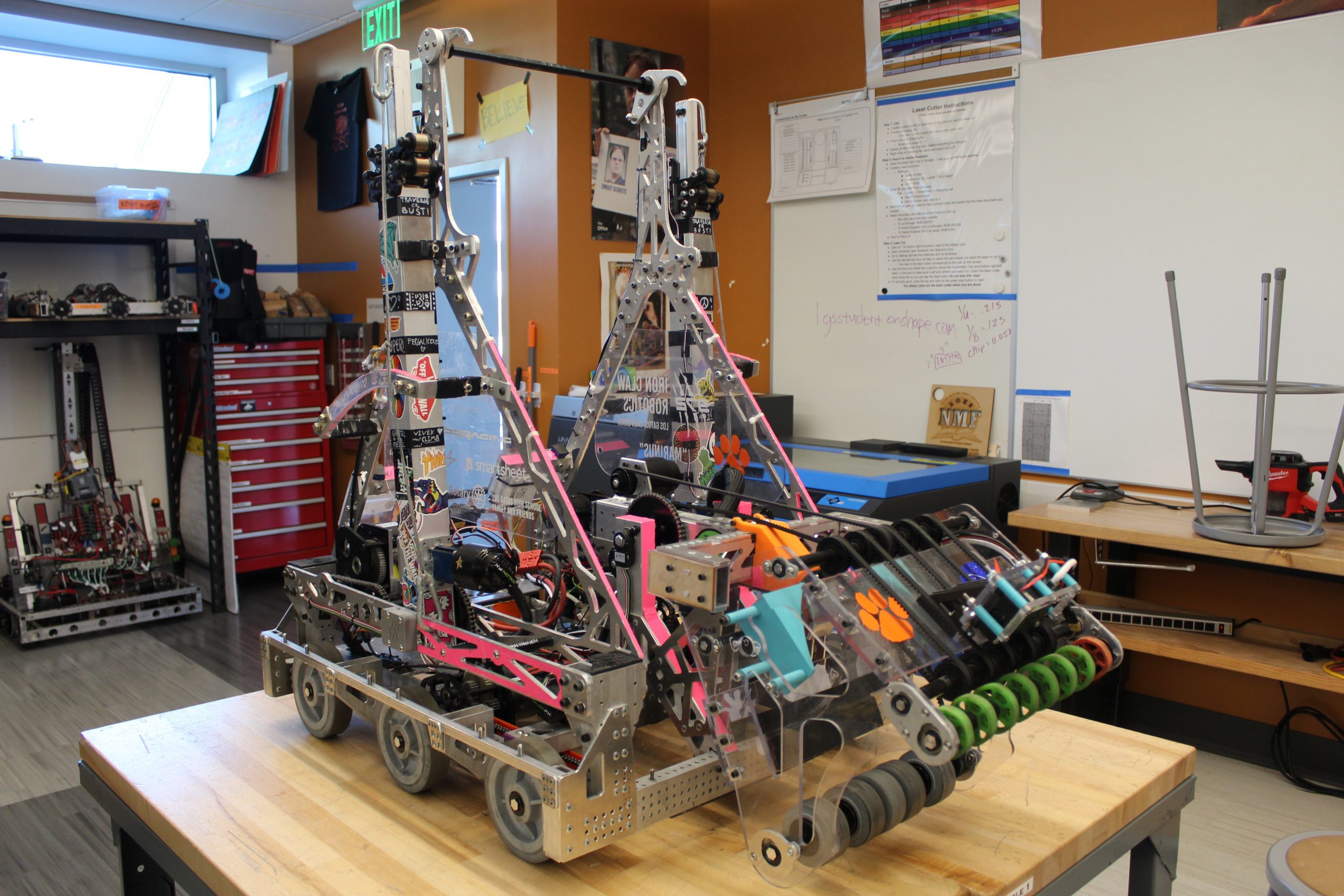
As February comes to a close, students have been hard at work during their break. Week seven has led our robot to progress nicely. All of our sub teams have been working hard to prepare for our first competition of the year, Silicon Valley Regional. This week, the arm, shooter, and intake have been mounted and wired onto our robot. Our subsystems were assembled separately and, when done, mounted on the drivetrain. We designed around serviceability and ease of understanding in preparation for competition. All power wires were labeled and routed separately from CAN and sensors for clarity in robot inspections, debugging, and replacing of parts. Wire connectors and extensions, for example, are all centralized in certain accessible locations to avoid having to access our protected upside-down control system board. The programming team has been successful in identifying the initial x and y velocities for shooting while moving (SWM). We can make various test cases, and make them work. We are now working on successfully integrating drivetrain into the test cases by setting drivetrain velocities and attempting to shoot at the actual pose of the speaker. The Vision team has been increasing the accuracy of our computer assisted game piece acquisition. This includes training better machine learning models and fixing the distortion of the camera. We have also [...]