2025 Competition Week 4 Blog
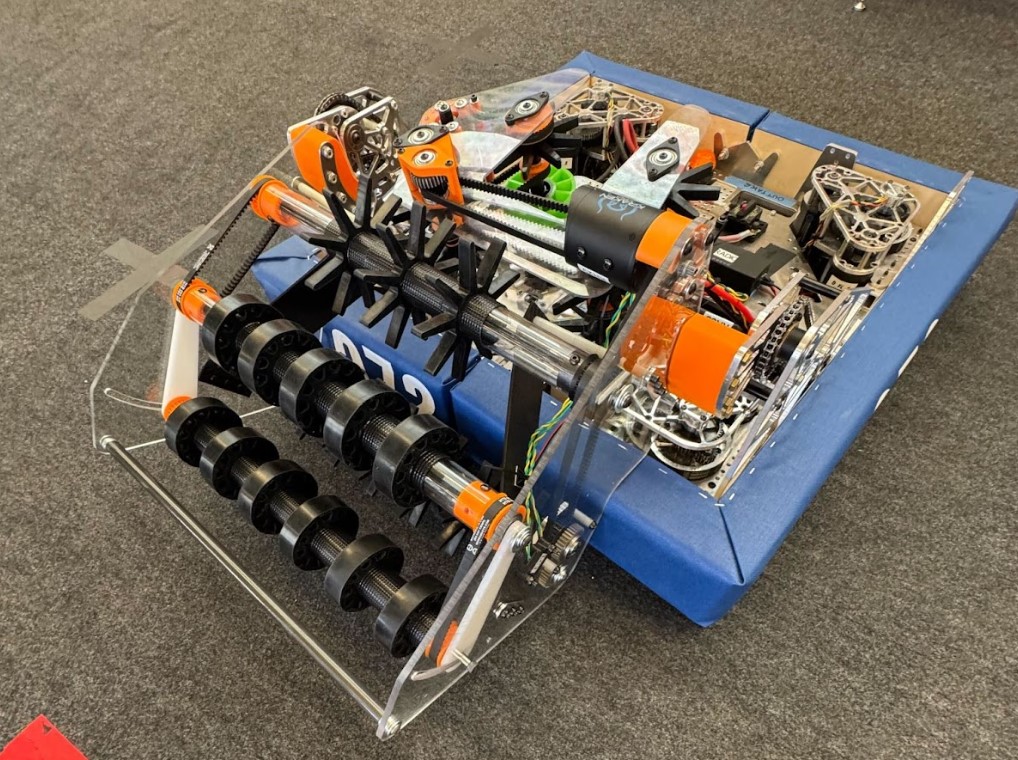
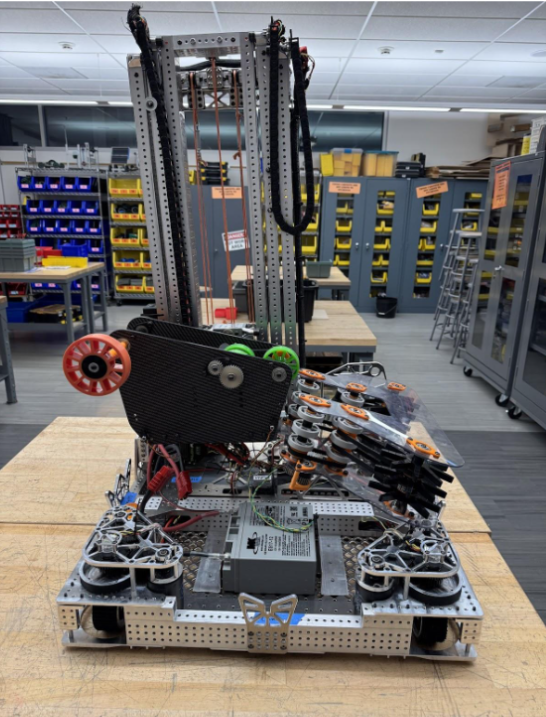
Returning from the SAC regional, the team made notes to get ready for the next competition, the East Bay Regional (EBR). The team met for a competition debrief in the beginning, which included discussion of competition performance, robot improvements, and logistical improvements for the next competition. We realized that driver practice and tuning auto routines would be the main focus of weeks 4 and 5. Another meeting on Friday, the team began fixing a few minor flaws in each subsystem. Per the competition debrief, we decided to replace a MaxComposite plate for aluminum on the outtake. Along with the outtake, the team had agreed upon improvements to the intake, gearing the first roller faster to allow the driver to intake coral at higher speeds, and adding a larger wheel to the center roller to better vector the coral in its horizontal orientation. The team additionally worked on improving the energy chain on the elevator, as it had previously caught on the hard stop, which prevents the outtake from fully stowing. Furthermore, the software team has been working on speeding up all the movements of the elevator and wrist, as well as tuning the vision alignment [...]