2025 Chezy Champ Blog
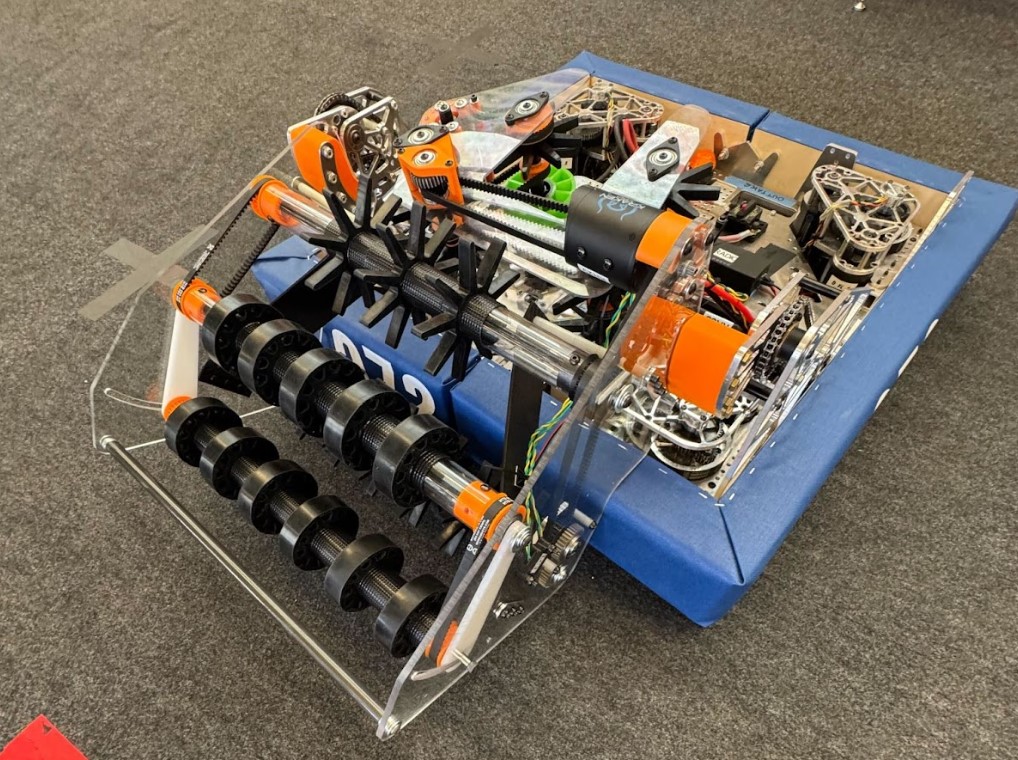
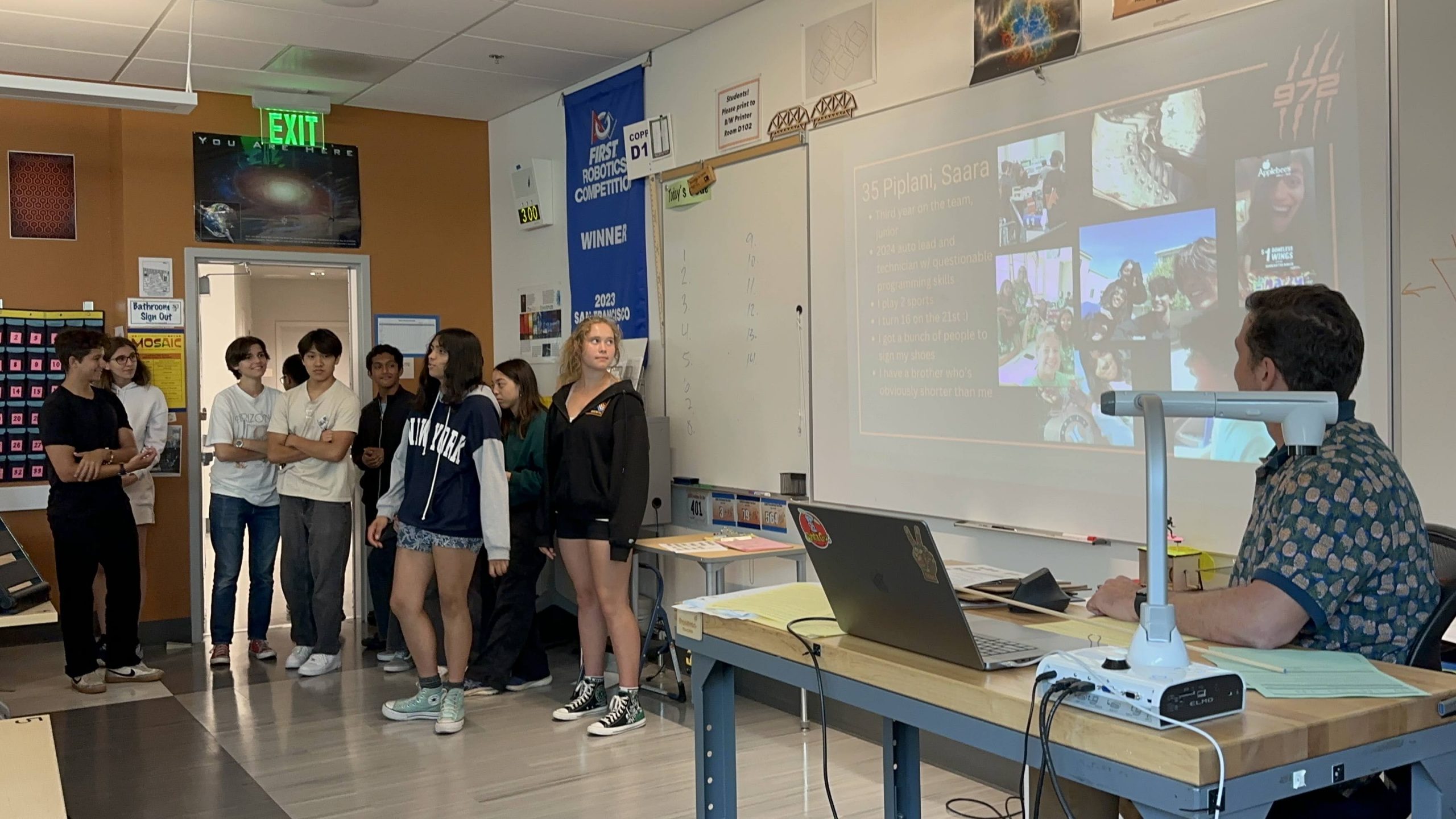
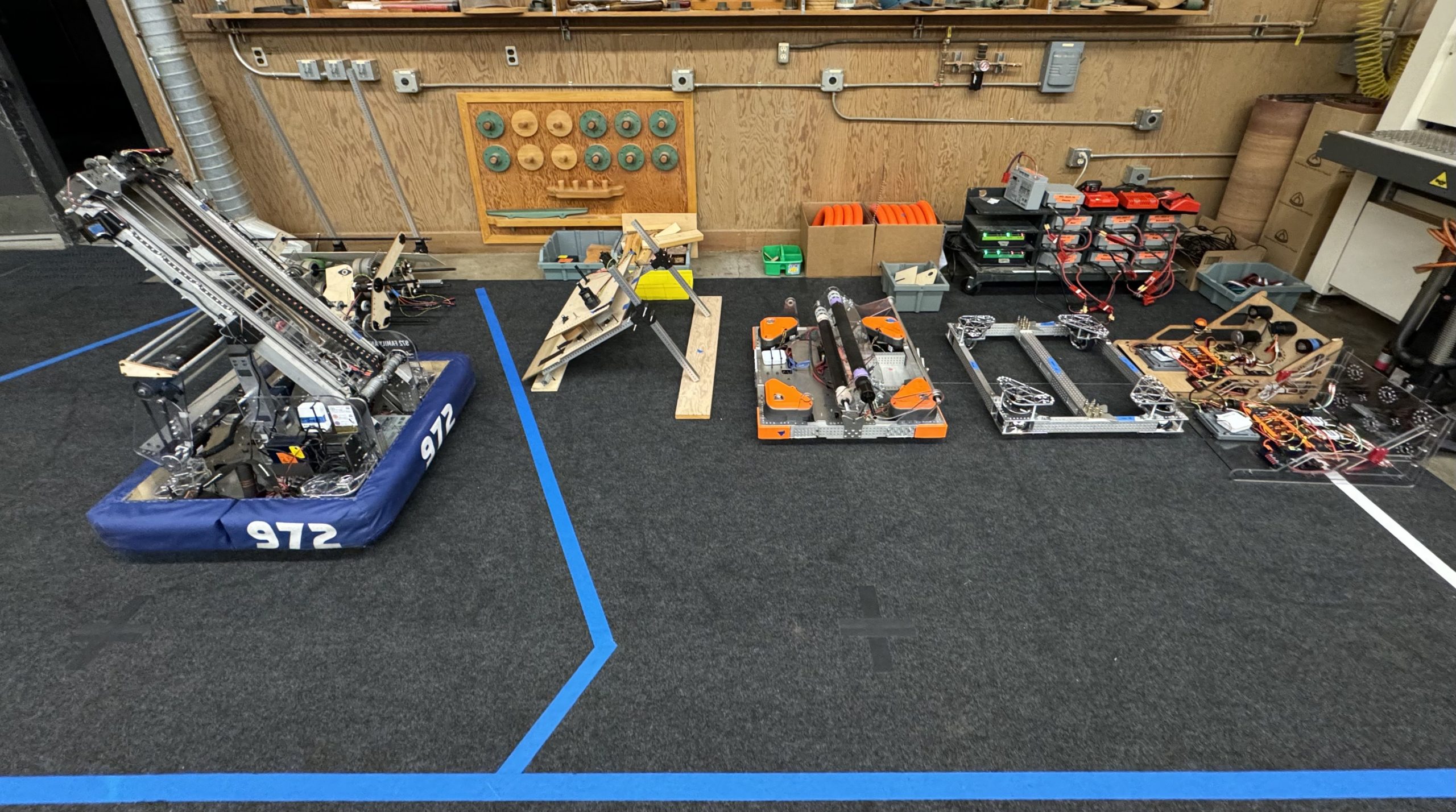
Hi! Welcome back to the Iron Claw Blog for the 2025-2026 season! It's great to see the team back, along with many new members joining our team!This year, the team decided to attend the Chezy Champ to improve our robot, Vantage, from last season. Learning from prior years, the team concluded that the Chezy Champ would also provide valuable experiences for the first-year students. To prepare for the competition, the team met with 971, Spartan Robotics, to practice on their field. We greatly appreciate the time 971 spent with us, which was really helpful in helping us refine our driving strategies, improve our robot’s performance, and gain valuable insights for the competition!With great programming work from last season, the programmers utilized their time on testing the code to minimize any possible mistakes in matches. The control system team spent a lot of time on CAN Bus troubleshooting, creating a checklist to improve and guide CAN Bus troubleshooting, testing the robot’s reliability, the team utilized 971’s practice field leading up to Chezy Champs for driver and human player practice, and to troubleshoot problems, so the team could have reliable performances at Chezy. Our human players both practiced to perfect the coral drop from the station and to improve communications and signals with the driver and drive coach. The strategy team split [...]