

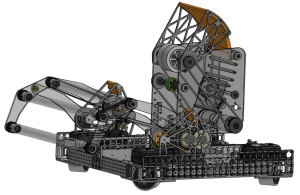
This offseason, we decided to build a robot to play a modified version of the 2020 FRC game, Infinite Recharge. We wanted to get more experience building robust linkage intakes and have a chance for the programming team to tune an adjustable-hood ball shooter.
The robot’s subsystems (intake and shooter) were primarily designed by first and second-year students, with minimal input and guidance from the upperclassmen, and were designed to be mounted on our new MK5n swerve drivetrain, with a redesigned control system board, and a new “waffle” mounting plate system that was lead by upperclassmen. The goal is to use these “waffle” mounting plates as a standard subsystem interface to improve serviceability no matter the subsystem. You can check out the MK5n Drivetrain blog here.

We’re proud of the work that they were able to accomplish and believe that this training has better prepared the entire team for the upcoming build season and competition season.
Partially inspired by 1678’s 2022 and 2020 robots – “Steal from the Best, Invent the Rest”, we de-scoped the game and decided to focus on what would teach us the most while being able to be built in the least amount of time. For example, we decided to only store one ball and have the indexer be a passive funnel rather than a spin-dexer to save time and complexity.
For the intake, we attempted a few new construction techniques, check out our Intake blog here. On our front roller, we decided to float over a silicone tube with an air compressor rather than covering it with grip tape. From preliminary testing, the silicone tube has been more grippy and more durable than the cat-tongue grip tape.

Another major change with this robot is the use of Kraken x44s where it makes sense. In our 2025 competition robot, we exclusively used Kraken x60s, which made getting the robot under the weight limit difficult. On our offseason robot, we used x44s on the feeder and intake rollers where the greater sustained power was not necessary, saving us 0.9 lbs overall. We decided to use Refire quick connect adapters with the Molex SL connectors on our Krakens to simplify wiring, improve serviceability and troubleshooting. You can check out the Shooter blog here.

We also purchased a new polycarbonate plate bender, which heats up a thin strip of the plate evenly, allowing us to make much stronger and more precise bends than we could before. This new capability was necessary to bend the passive funnel indexer into shape, as it requires 3 accurate bends on one plate.

Overall, we’re really happy with how our offseason robot turned out, it is fully assembled and our software team is busy with some fine tuning.
In parallel we also had our vision team fine tune Object Detection on Vantage, our Reefscape Competition robot. A group of first year students stepped up to work on LEDs for improved drive team feedback during matches, their testing on Vantage was a great success. A second group of first year students worked on a universal adjustable 3D printed camera mount system that can easily mount to a 2×1 or 1×1 rail, we plan to publish a blog on that shortly. Our teams offseason training and fall season projects are wrapping up.
Our team can’t wait for the Rebuilt Kick-Off and participating next year! Wishing everyone in the FRC Community a Happy Holiday Season.