

At the start of build week three, our Decision Voting Committee (DVC) made some important decisions regarding what mechanism had conceptually demonstrated the ability from a hardware and software point of view to support our functional requirements & strategy, and what mechanism would be given an additional week of prototyping time. Our Intake and Store, Spindexer, and Turreted Shooter were approved for our competition robot. Our two climb prototypes were given another week to finalize their prototypes.

Intake & Store:
Over the past week, our team has been completing the intake CAD. We decided to do a linear intake with an extendable hopper on top of it, so it can store more balls. For this design, we made the hopper extend horizontally while the intaking mechanism extends at an angle, allowing us to have a higher capacity while still fitting under the trench, even when the intake is stowed. We are now finalizing our mounting system, which will allow our manufacturing team to get to work.
Spindexer:
With the decision to move forward with the spindexer our cadders started working on the CAD for a more complete design based off of our prototype to be integrated with other subsystems. We are taking inspiration from the 111 Wildstang’s spindexer blog as well as 125 Neutron’s 2017 bot. We are now finalizing our Bill of Materials and CAD, machining will be next, along with a serviceable wire path back to the PDH.
Without the design finished, it was difficult for software to finalize our code. However, there were some ideas for velocity control to ensure blockage did not disrupt input into the shooter. However, for now, we are keeping it simple with just setting the motor power.
Turreted Shooter:
Our software team experimented heavily this week on tuning game-specific logic. We were focused on three things. One, in an attempt to make the turret smoother, we tried out new controllers such as PositionVoltage and two PIDs. This is because we believe controlling velocity and position as an input may improve stability and performance. More work will be needed to refine this though. Two, vision has progressed with attention to camera placement on the robot. And three, code for shuttling and shooting based on the location on the field has been added for the turret and can be easily added to the shooter once our Beta bot has an adjustable hooded shooter. Our plans for the following weeks will be to continue with tuning and optimization once we have all hardware integrated to do full on shoot on the move testing.
L1 Climb:
Over the past week, our team made steady progress on the L1 climb. We started by using an extra drivetrain to determine climb performance by slowly increasing elevator speeds (0.2–0.4 increments) to measure efficiency and climb time, while taking slo-mo videos to calculate climb speeds from the videos. These tests helped define next steps, including comparing aluminum plates versus polycarb, extending the hook length to clear the bumper, and validating performance with legal FRC bumpers installed. Afterwards, we began research on telescoping arm mechanisms, CADed an initial hook design, and explored practical integration options for the robot. Finally, our design strengthened as hook and motor orientations were refined in CAD to ensure proper fit, parts will be machined, and assembled for further testing.
Windmill Climb:
This week, we were able to attempt a climb for the first time.
The force of the robot pulling on one of the tubes collapsed it, so we added 1/4in aluminum plates to reinforce it. With those, we were able to get a human-assisted L3, but the chain kept slipping and the plate connecting the two arms was bending horribly. After that, we worked on our final CAD and began machining. We need to finish machining and assembly, but this climb seems doable if we can fix the issues that hindered the first few attempts.
Drivetrain and Control System Board:
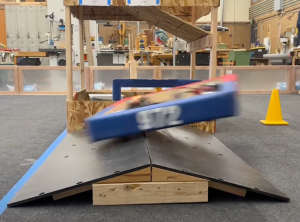
This week, our team focused on reliability testing and improving our drivetrain to make sure it’s competition ready.
We drove the robot over the bump many many times to see how it handled the bump at high and low speeds, and through the trench. After these tests, we performed a thorough check-up to make sure nothing was loose or damaged and that everything was still working correctly. We also took time to clean up the wiring, which helps make the robot more serviceable, easier to maintain, and more reliable overall.

Rebuilt Team Shirts:
Our 2026 Rebuilt Team shirt was designed by Catie Chen, she created an amazing design, which also includes our 2025 – 2026 sponsors. We are grateful for their financial support, which allows us to train new and returning students during the fall season with hands-on projects, build a competition robot with spares, and compete at competitions.
You can continue to track our build season progress at our website’s photo album.