Build Season Week 7 Blog
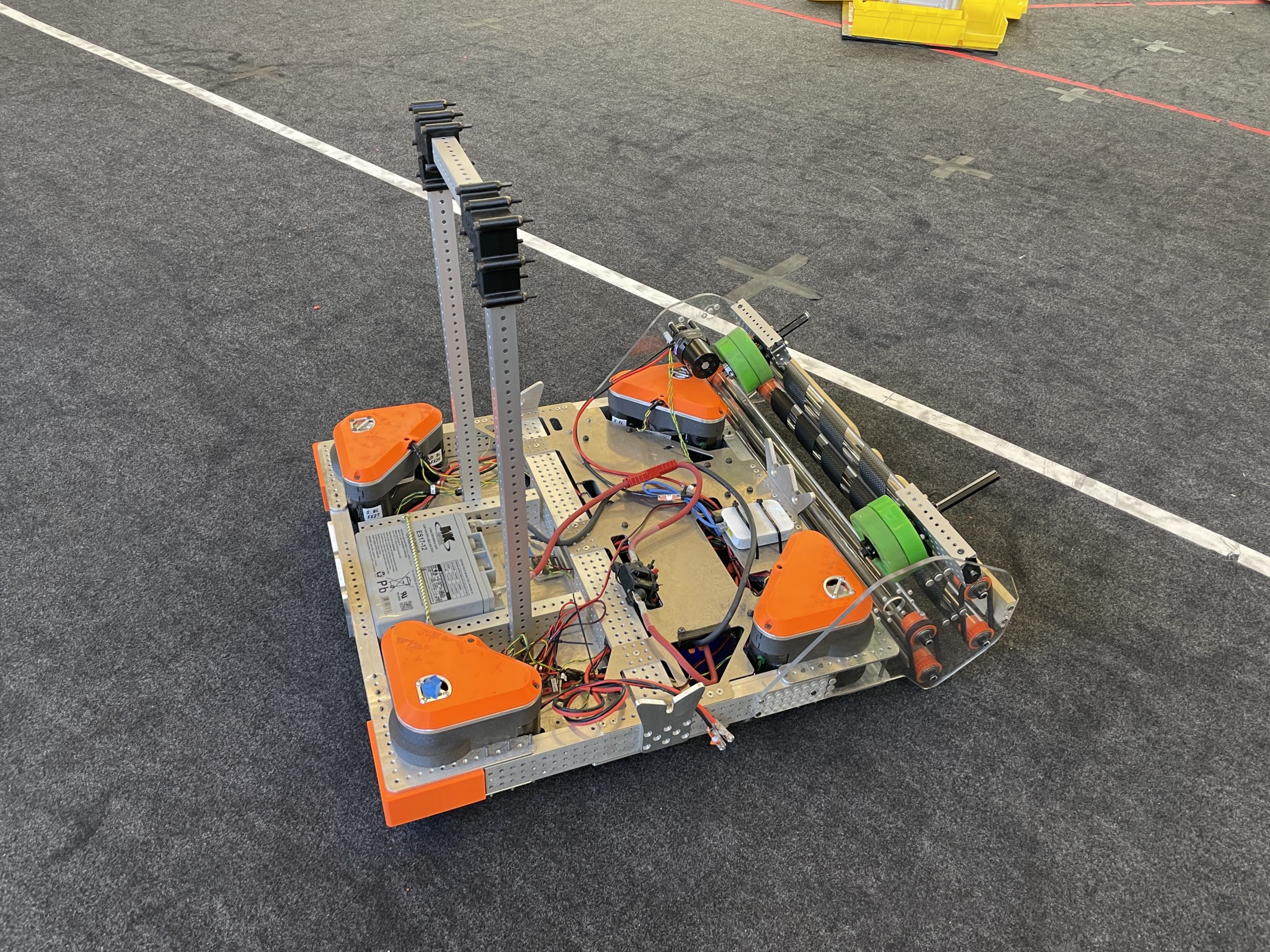
Week 0 Scrimmage Preparations: As we continued to work towards the Spartan Week 0 event, we finalized the list of our competition members in both the pit team and strategy. We made some final touches and adjustments to have a competitive robot to field at the event. The week leading up to the event, we allowed the software team to make some major improvements to the robots functions while our new driver and drive coach got prepared. Intake / Store Testing: Throughout the preparations for week zero we made minor tweaks to the intake and store subsystem, our testing revealed some performance issues which need to be fixed. We found that many of the balls would shoot out of the top of the hopper rather than going into the dye rotor (spindexer), so we added a net to the extending portion of the hopper. Shooter Testing: Over the past two weeks of FRC, our team has had several successes and roadblocks. Our turret now aims exceptionally well using a phase shift combined with the robot velocity. It’s been smoothed with a linear filter for limiting jitter. Our shooter and hood are currently operating well, and have a strong outtake speed, looking forward to seeing how it works at [...]