2025 Competition Week 5 Blog
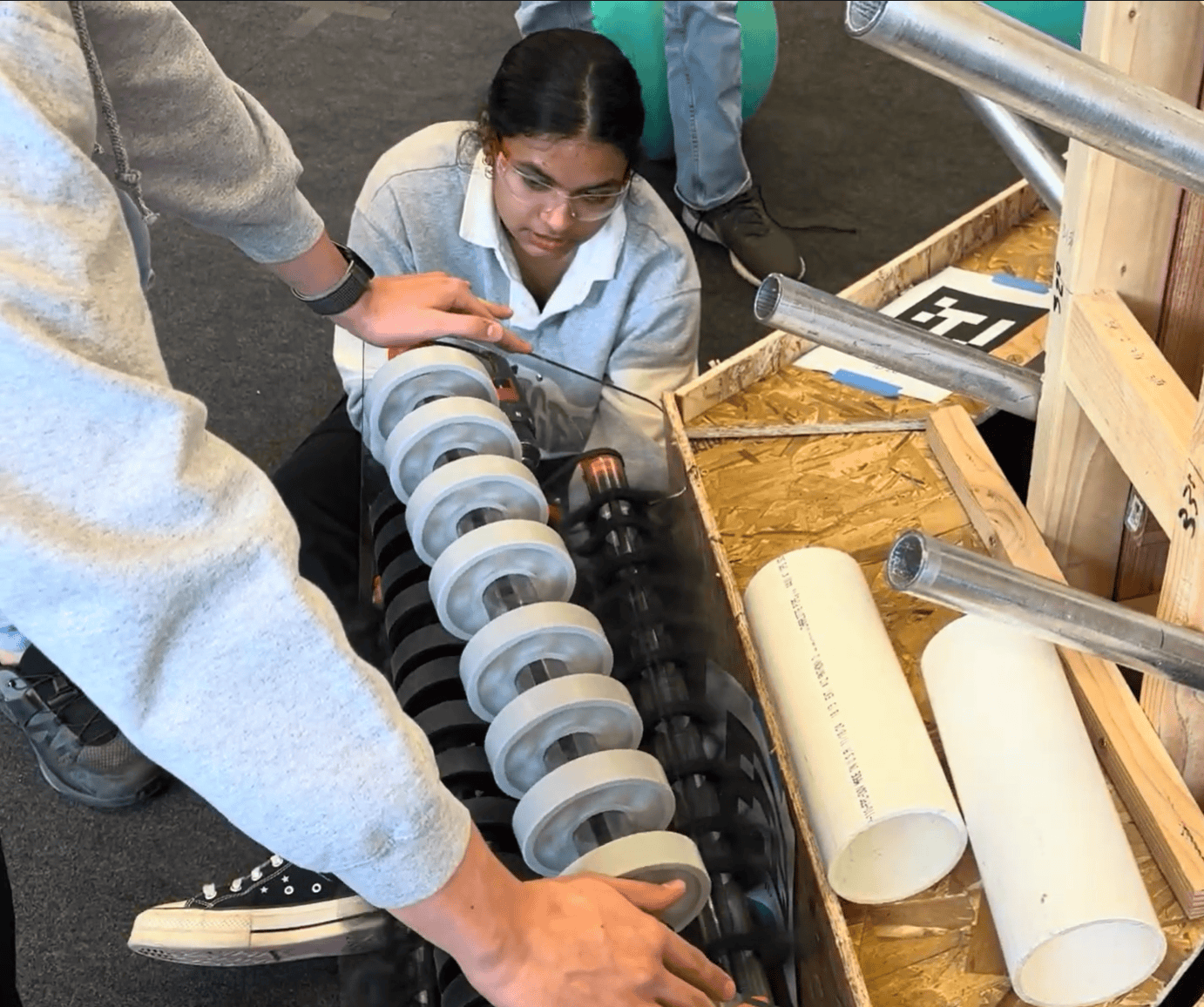
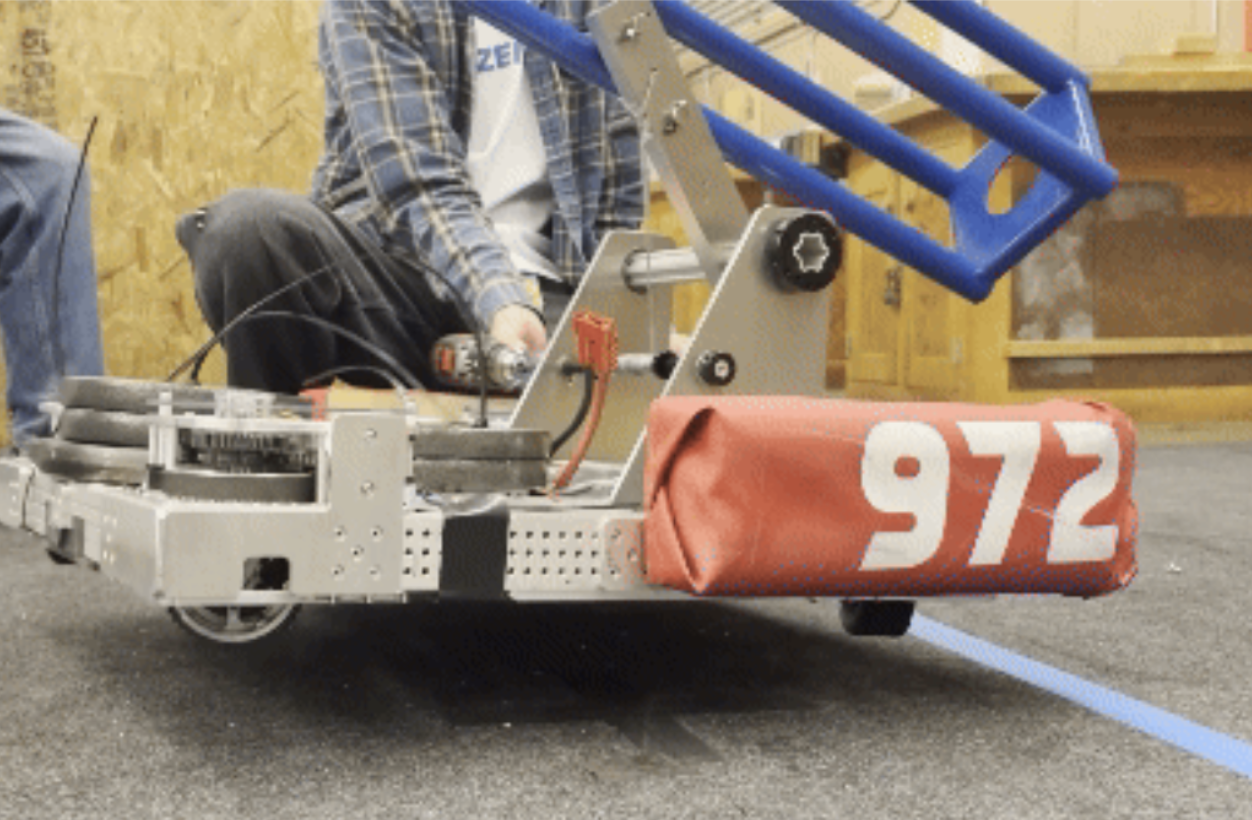
This week, we made huge improvements to be well prepared for the East Bay Regional (EBR). Since we finished CADing last week, we were able to start assembly immediately. This week has been packed with testing, improvements, and strategic discussions as we gear up for upcoming competitions. From refining intake mechanisms to optimizing our scouting app, every detail is being fine-tuned to ensure peak performance. We assembled spare components onto the beta bot for testing purposes, ensuring reliability and durability under competitive conditions. Additionally, minor improvements were made to the scouting app to allow for better usability and efficiency. To address control system stability issues, adjustments were made to the plate under the CANivore. On Wednesday, we focused on improving the practice field to better simulate real competition environments. By Friday, we had fixed the camera mount to ensure better visibility and alignment during matches. A new intake system with a larger wheel was implemented to address the issue of pushing the coral away during both practices and competitions. We are currently testing different wheel sizes, comparing 5-inch and 3-inch wheels, while evaluating the impact of material flexibility under high-speed rotation. Significant progress was made [...]