Operations of Competition Selection
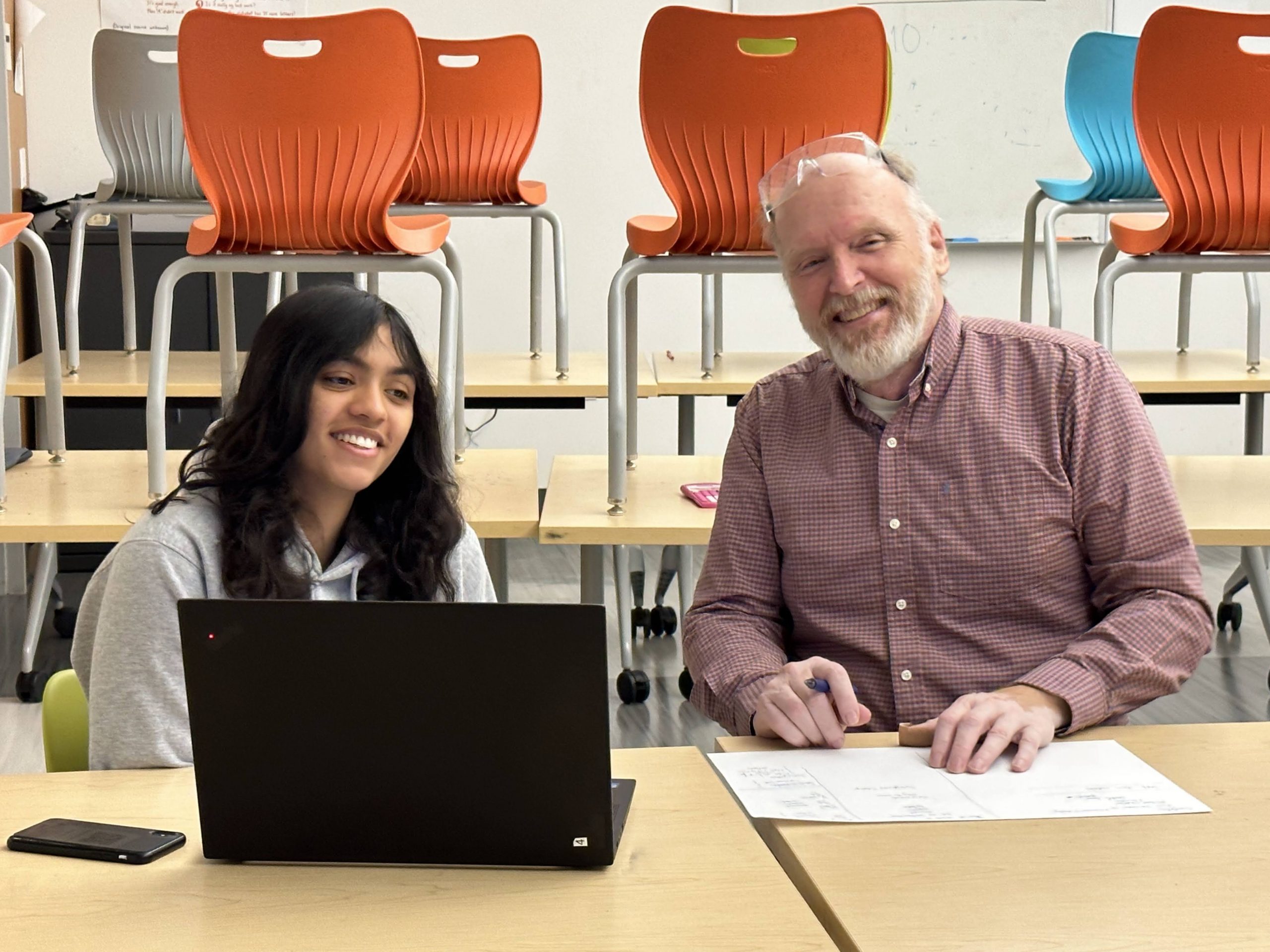
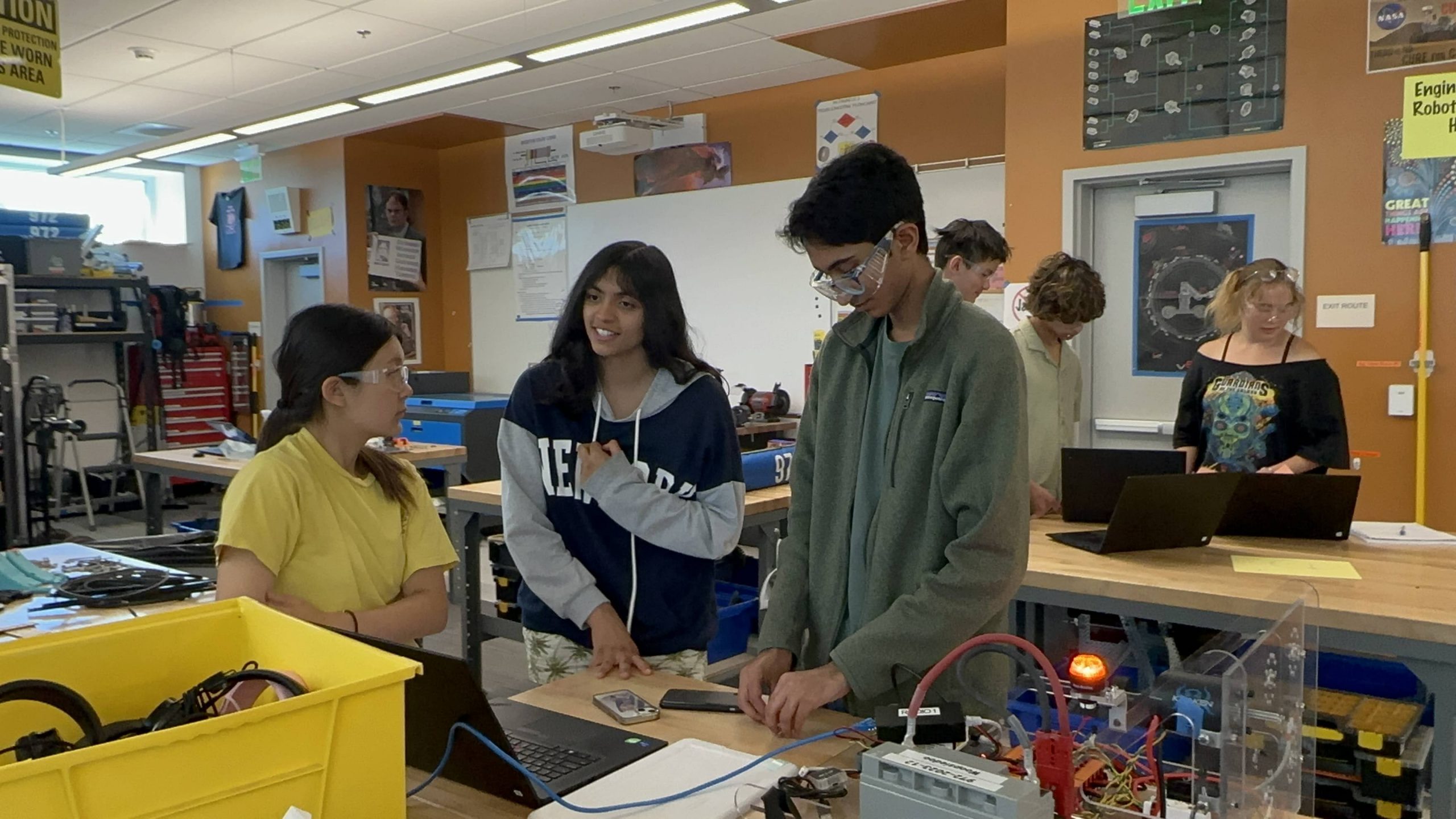
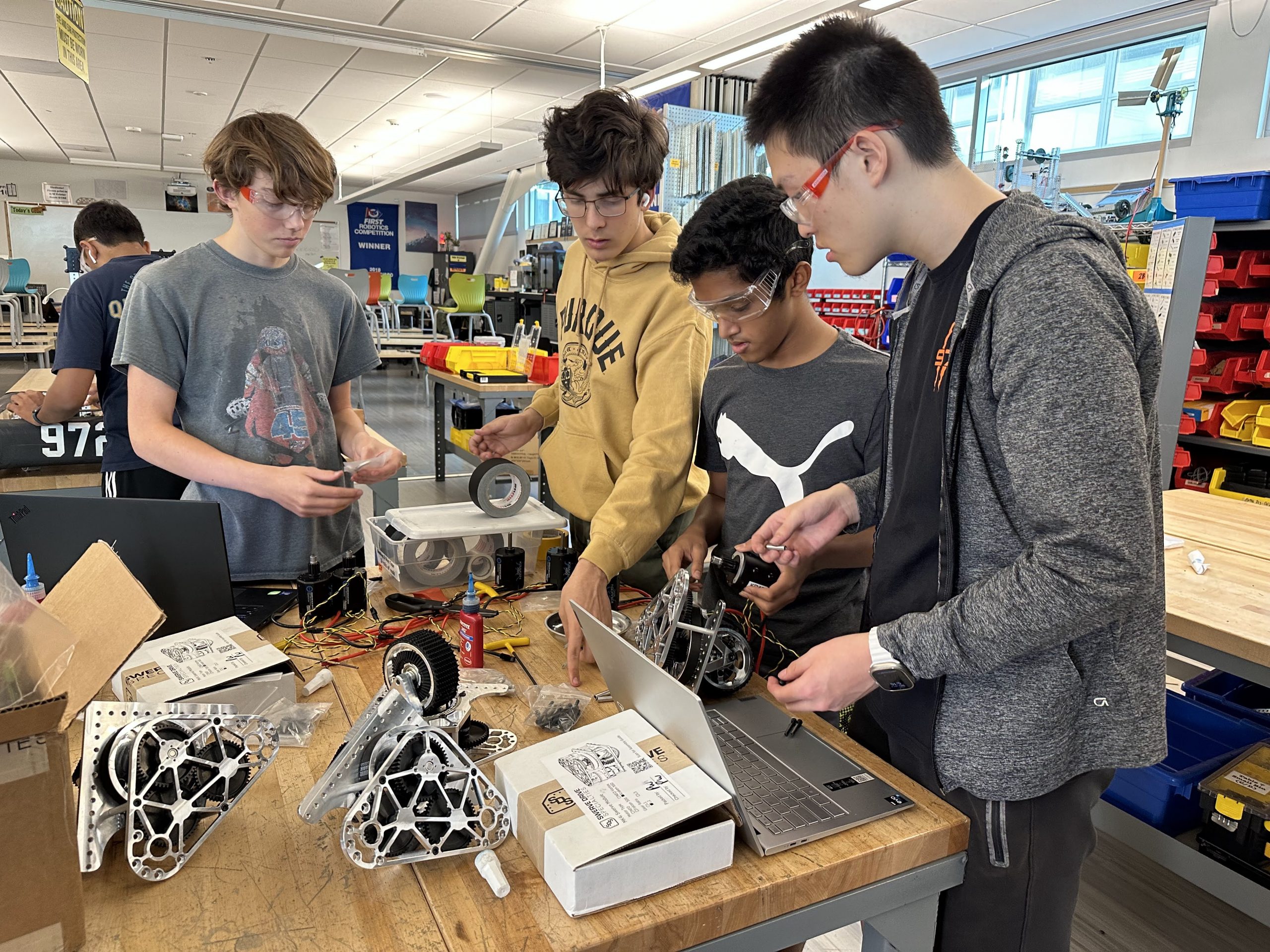
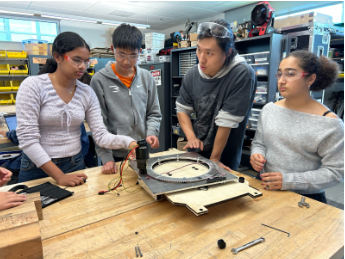
The new year means setting up for success, including organizing our Pit, managing operations, and handling new material shipments. Our shop manager, Ellery Han, has been cleaning the Pit and delegating tasks to sort last year's parts, screws, and miscellaneous items. A well-organized Pit is crucial for efficiency. With packages arriving nonstop, we order early to avoid delays and ensure we have everything needed for the Fall and Build Seasons. Students help sort and take inventory, ensuring each subteam knows what materials are available for their projects. The operations subteam, in which all members are required to contribute at least 4 hours of admin tasks and additional upkeep work, is led by our new operations director, Claire Mayder. She’s been training new students and leads, applying for grants, and more. Our new communications lead, Jahnvi Bheemarasetti, assists Claire. Our team fundraises the majority of its money in the Fall Season, this includes receiving money from sponsors such as the Wild Cat Foundation–our school foundation that raises money for school-related activities. Big thanks to them as well as all of our other sponsors! We’ve also had significant work done in documentation for operations to ensure efficiency in the build season and [...]