

We’re currently behind but catching up fast. Even though there’s only a little over two weeks left in build season, we still have about half the number of hours remaining. I guess that’s what happens when our schedule is heavily skewed toward more hours at the end of build season. Going into Week 5, we have a driving robot, which is a big milestone in build season.
On the mechanical side, our CADers have been working on our elevator mechanism and the elevator carriage. Instead of the monorail elevator design we used last year, we are making an elevator with two rails parallel to one another–a design that proved successful in 2018. CADers also worked on gearboxes and other integrative components to finish our mechanisms and overall design. Meanwhile, our machinists have worked on brackets, hex hubs, and elevator rails (which they are still working on).
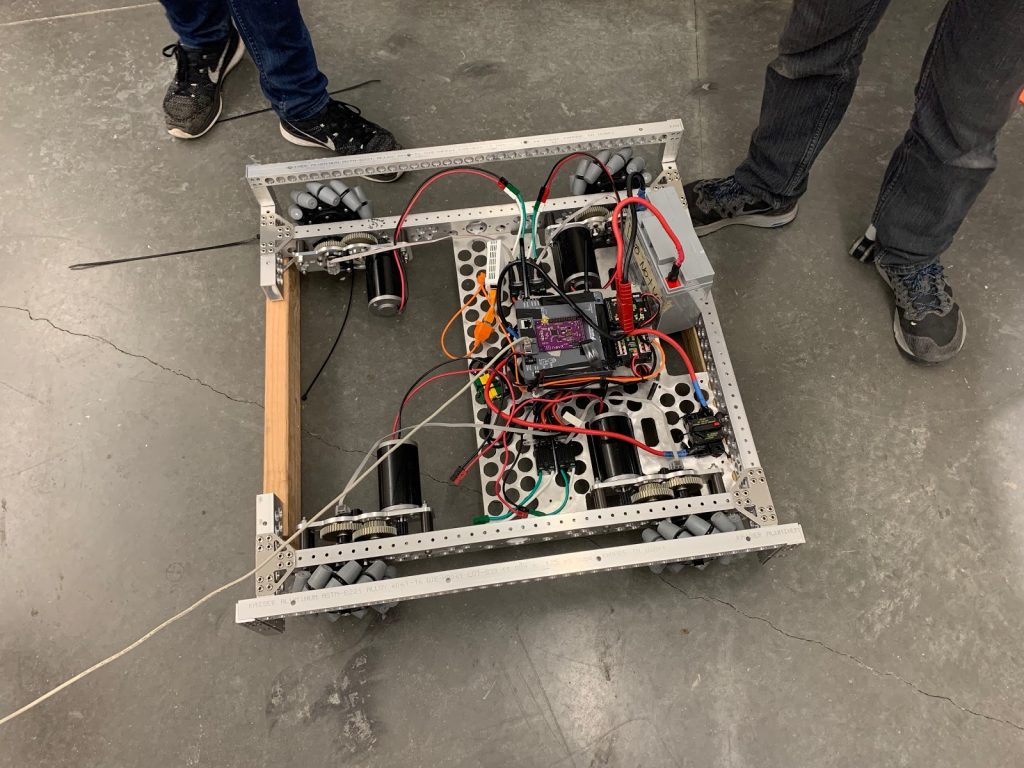
Assembly and electrical members have focused on building our chassis from our machined drive rails and constructing our electrical boards. We chose to build two robots this year, and currently our first robot chassis is fully assembled with an electrical board, while our second robot is slightly behind without attached electronics. Having learned from our mistake of using a slanted electrical board last year, we focused on making a “belly-pan” board this year to lower our robot’s center of gravity.

On the programming side, we have just about finished our robot code, though the vast majority of it has not been tested. Our robot code includes a state-space mechanism control system, which we decided to use this year in place of a Proportional-Integral-Derivative (PID) control like we did in past years.
Now that our CAD is just about complete, we are transitioning to manufacturing our elevator and intake mechanisms. Next week, we’re headed for DESTINATION: FINISHED ROBOT!
This account is managed by the Iron Claw Robotics website team. Blog posts published by this user are either written by students outside the website team or written by multiple people.