

One of our ad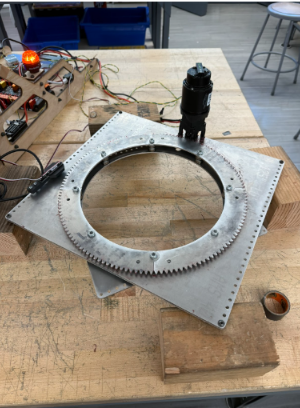 vanced projects for the 2024 offseason is building a turret. This is a new subsystem for our team that we’ve never made before, so it was a steep learning curve for everyone involved in the project. Having a turret allows a
vanced projects for the 2024 offseason is building a turret. This is a new subsystem for our team that we’ve never made before, so it was a steep learning curve for everyone involved in the project. Having a turret allows a
greater range of motion and faster aiming and scoring, giving our robots more versatility and making scoring more efficient. Last year in Crescendo, many of the top teams had turrets, which gave them an edge in competitions. In previous years beyond that, there were several instances where having a turret gave teams a huge advantage over others.
Our team decided to take two approaches to the project. Since this is our first time building a turret, we wanted to have a

 model for us to design our own. As a result, we purchased the GreyT turret from West Coast Products and then used the design philosophy of that turret to design our version from scratch, which would give us greater flexibility and freedom for design. The manufacturing process went well, but due to issues with assembly, backordered parts, and our project lead leaving the team, we decided to scrap the project and work with the GreyT turret instead, since it would be easier to assemble and test. Assembly went well, with only a few minor problems with missing hardware. We also had to im
model for us to design our own. As a result, we purchased the GreyT turret from West Coast Products and then used the design philosophy of that turret to design our version from scratch, which would give us greater flexibility and freedom for design. The manufacturing process went well, but due to issues with assembly, backordered parts, and our project lead leaving the team, we decided to scrap the project and work with the GreyT turret instead, since it would be easier to assemble and test. Assembly went well, with only a few minor problems with missing hardware. We also had to im provise with the mounting of a magnetic limit switch on the turret, since it wasn’t originally designed to have sensors or a hard stop.
provise with the mounting of a magnetic limit switch on the turret, since it wasn’t originally designed to have sensors or a hard stop.
After assembly, the turret was passed on to the programmers for testing. The functional requirements that we set at the start of the project stated that the turret must be able to complete a full rotation in half a second and turn to a specific angle with a maximum of two degrees of tolerance. Having a Falcon 500 powering the
turret made reaching the speed requirement easy, and with a few tweaks to the code, our turret was consistently within 1 degree of tolerance. We’re continuing to make improvements to the turret as off season continues. The next steps are adding load to the turret to see if the code changes because of it and mounting the turret on a swerve drivetrain. In the future, we plan to continue to make improvements to the turret and integrate it with other subsystems like a shooter and vision.