

This past week has been extremely productive for our team, with significant progress across various areas. On the prototyping side, we continued working on the intake, outtake, and our deep cage climb.
We have been avidly testing ways to pick up coral from every orientation on the ground and trying various indexers to re-orient the coral into a vertical position so our robot can score it in the trough (L1).
Over the weekend, we assembled and tested our bicep climb mechanism. We made solid improvements to the lever tube, switching to 4 ¼” plates for version 2, enhancing its strength. We added some extra weights to imitate a robot’s realistic weight. We’re also looking into ways to enhance alignment and efficiency, including pocketing and experimenting with alternative lever materials.
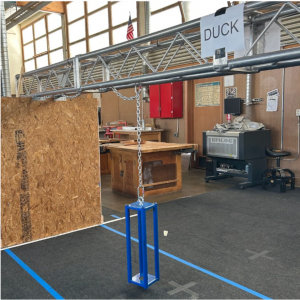 We also developed a second version of the outtake to enhance its functionality. We’ve completed the drivetrain assembly and the control systems board. Additionally, we installed the climbing cages on the practice field, where we had the opportunity to host Team 971 on Thursday who were doing some auto-testing on their dev robot.
We also developed a second version of the outtake to enhance its functionality. We’ve completed the drivetrain assembly and the control systems board. Additionally, we installed the climbing cages on the practice field, where we had the opportunity to host Team 971 on Thursday who were doing some auto-testing on their dev robot.
We also continued testing on our Alphabot, practicing cycle times and how quickly our robot can score coral on the reef. We managed to score on L2, L3, and L4 (the video is on Instagram!).
In terms of software, we worked to align Vision and address odometry issues for the auto routine. We had to input the offsets of the branches on our practice field as they are not the exact measurements in the game manual.
On the design front, we conducted a team vote on some pin designs, and launched our apparel sales—make sure to grab some gear –>2025 972 Apparel Order Form!
Lastly, with the help of our dedicated team member, Catie Chen, we submitted our entry for the animation award—check it out here –> The Ripple Effect! Overall, it’s been a highly productive week for Iron Claw 972, and we’re eager to see where this journey takes us. Stay tuned for more updates as we prepare for this season!