Competition Recap and Houston Announcement
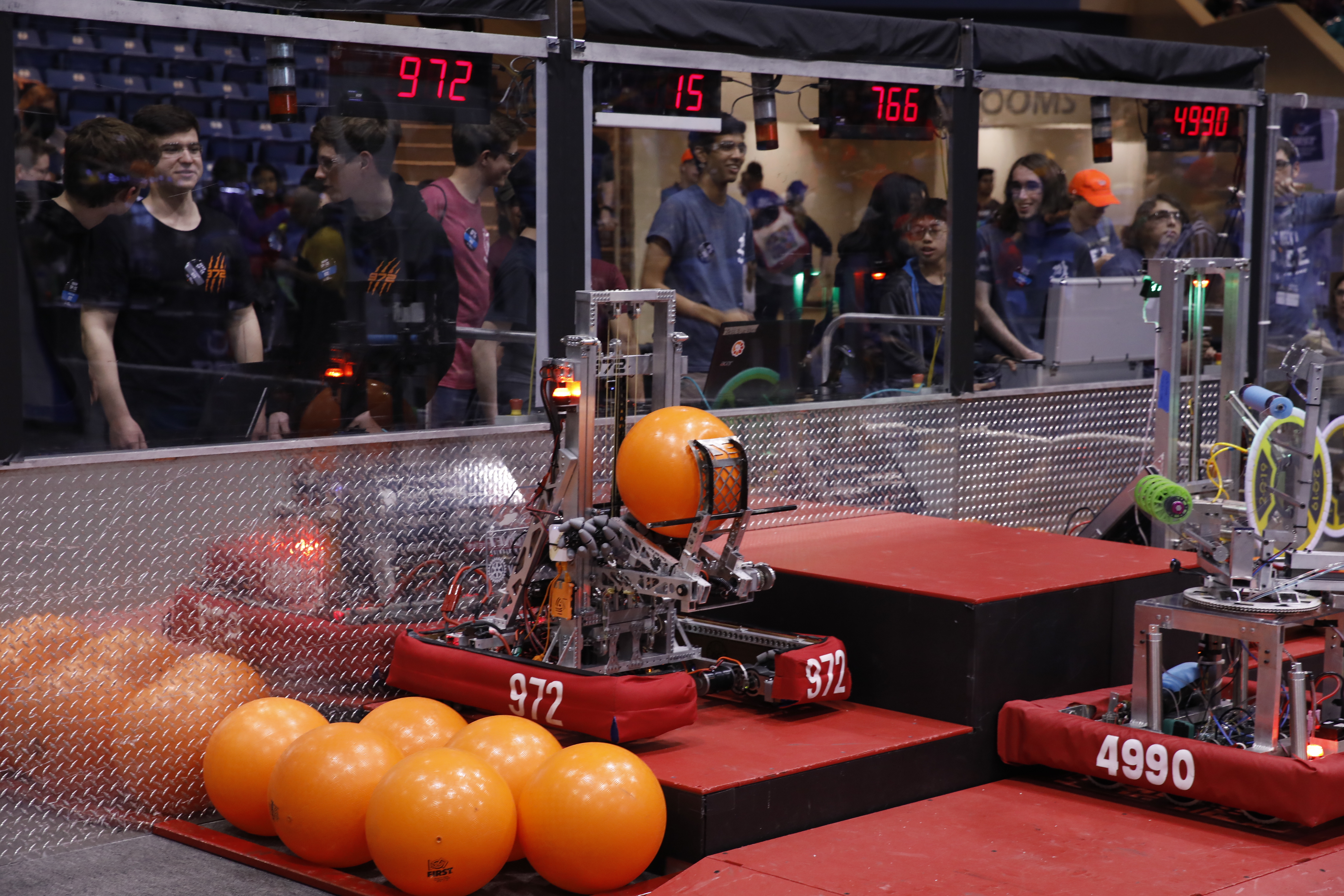
Our first competition was the San Francisco Regional. We ran into technical difficulties, particularly with the electrical board. Our planning for assembly was not up to par, so we were faced with mechanical issues as well. From there, we knew what we had to do in order to perform better at the next competition. Although our performance at SFR was not as successful as we had hoped, we agreed that this was a stepping stone we could utilize in order to learn from our mistakes. Putting this into practice, we spent a lot of time in the two weeks before our second competition testing and refining our mechanisms on our second robot. By the time of the Silicon Valley Regional, it had become clear that all of the hard work we put into preparing had paid off: our robot ran much more smoothly, and we had improved to the point that we were the number one robot for delivering cargo. After 80 qualification matches, alliance selection began and our performance earned us a spot alongside the fourth seed alliance, headed by Team 604. In the playoffs, we made it through the quarterfinals and semifinals to ultimately compete against Team 254, one of the best teams in the world. Although we ultimately lost against them, as a result of [...]