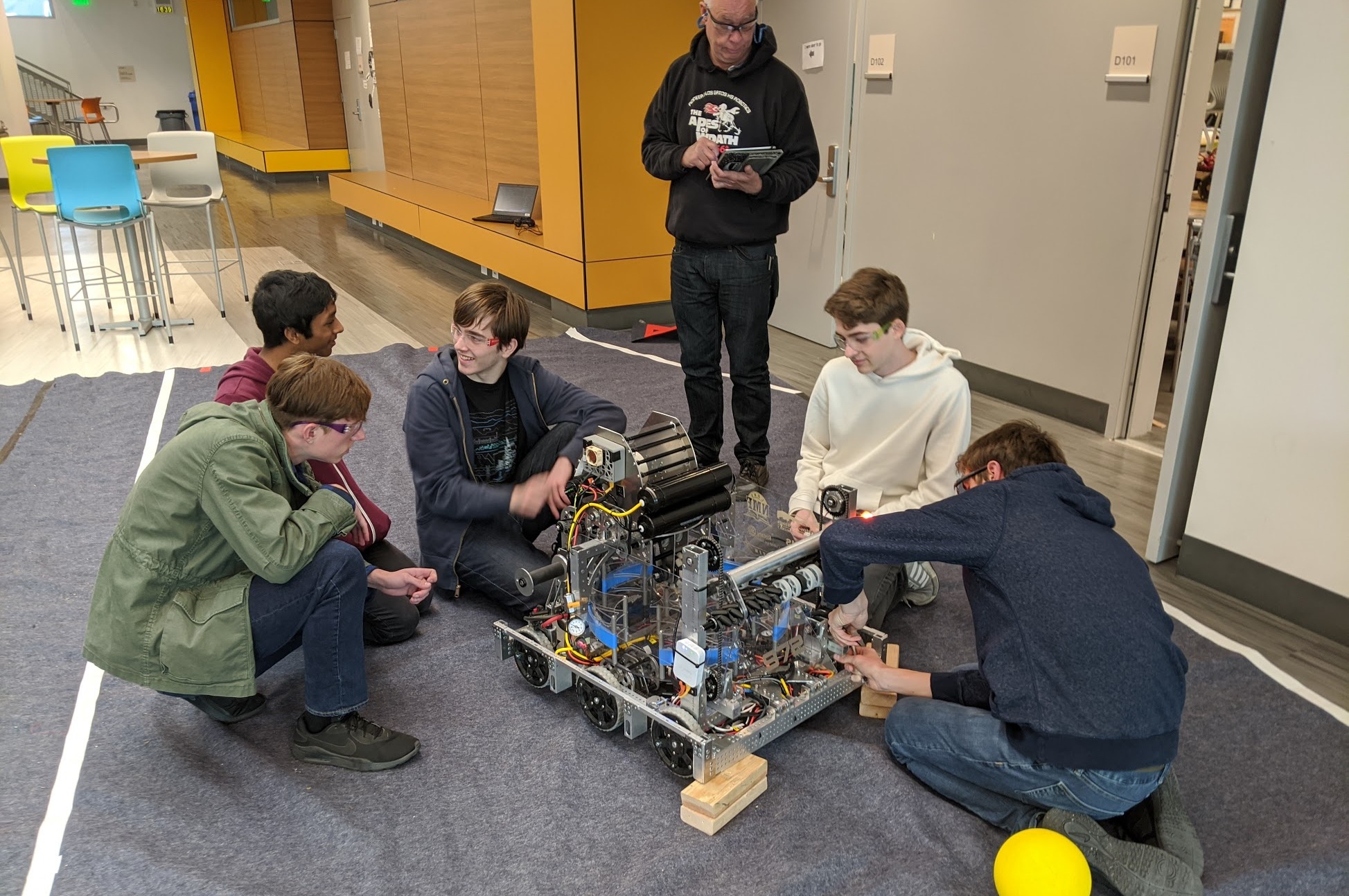
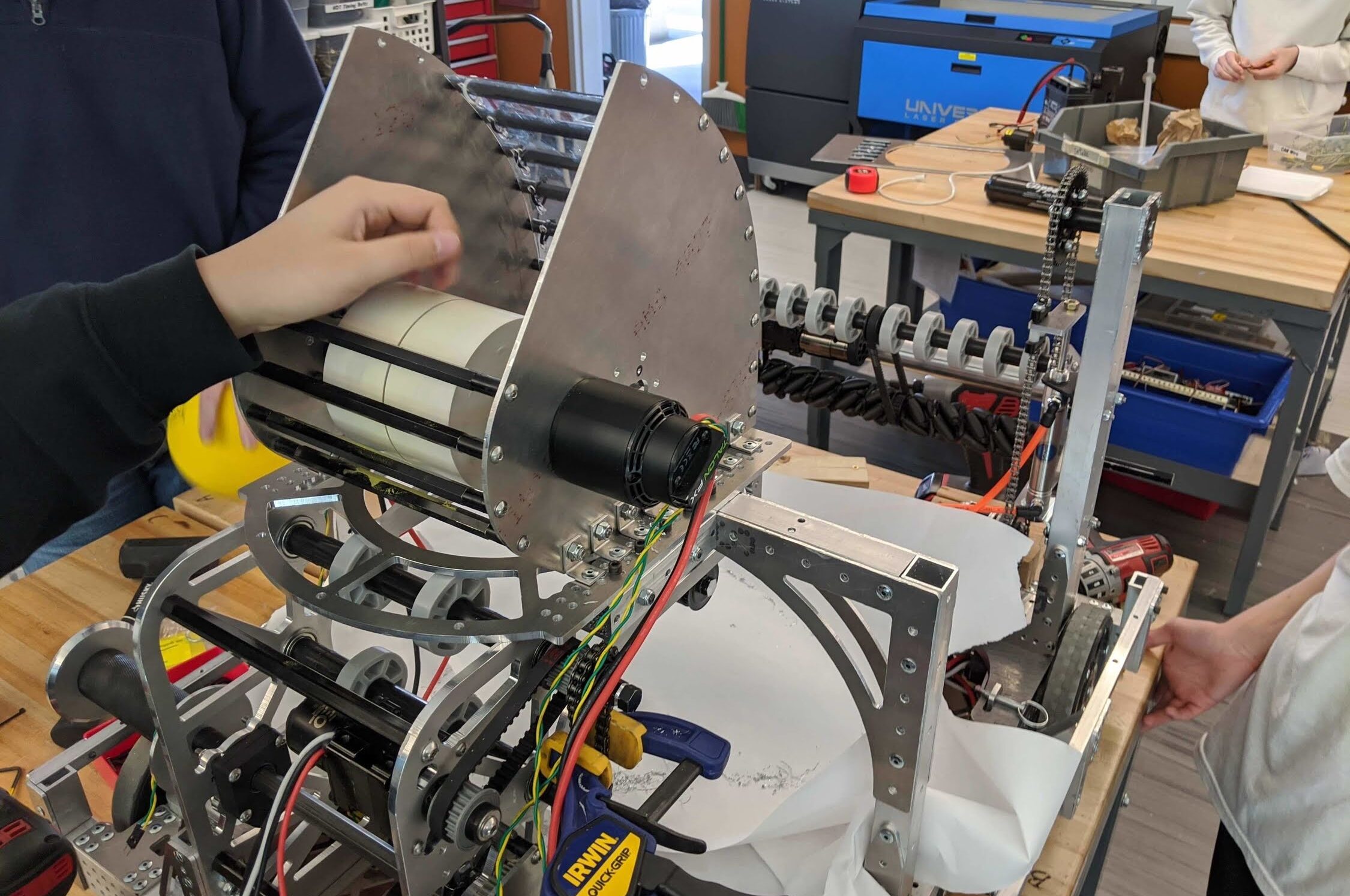
This week, we continued with prototyping by splitting into three main groups: indexing, shooter, and intake. For indexing, or ball manipulation inside the robot, we decided to CAD and prototype the c-index as well as a spiraling prototype. Furthermore, the shooter group prototyped a single-flywheel shooter, and they are making great progress on improving the precision and accuracy of it. They have started calculating the optimal angle and velocity at which to shoot the ball in regards to the outer port. The shooter group will also be prototyping a double flywheel shooter to see how it compares to the single flywheel. The intake group was also hard at work exploring different variations of a rolly grabber. Although we haven’t finished all the prototypes and finalized our design, we made some excellent progress this week and we hope to decide on a design next week. In addition, we finished assembling the chassis of our robot, the foundation for all of our mechanisms. We decided on a smaller size robot this year, being 26”by 30”, compared to last years’ 30” by 30” chassis. We believe that this smaller design will be beneficial during matches due to the fact that we can fit under the Control Panel. We decided to make a shorter, smaller robot because we [...]