2019 Build Blog Week Two
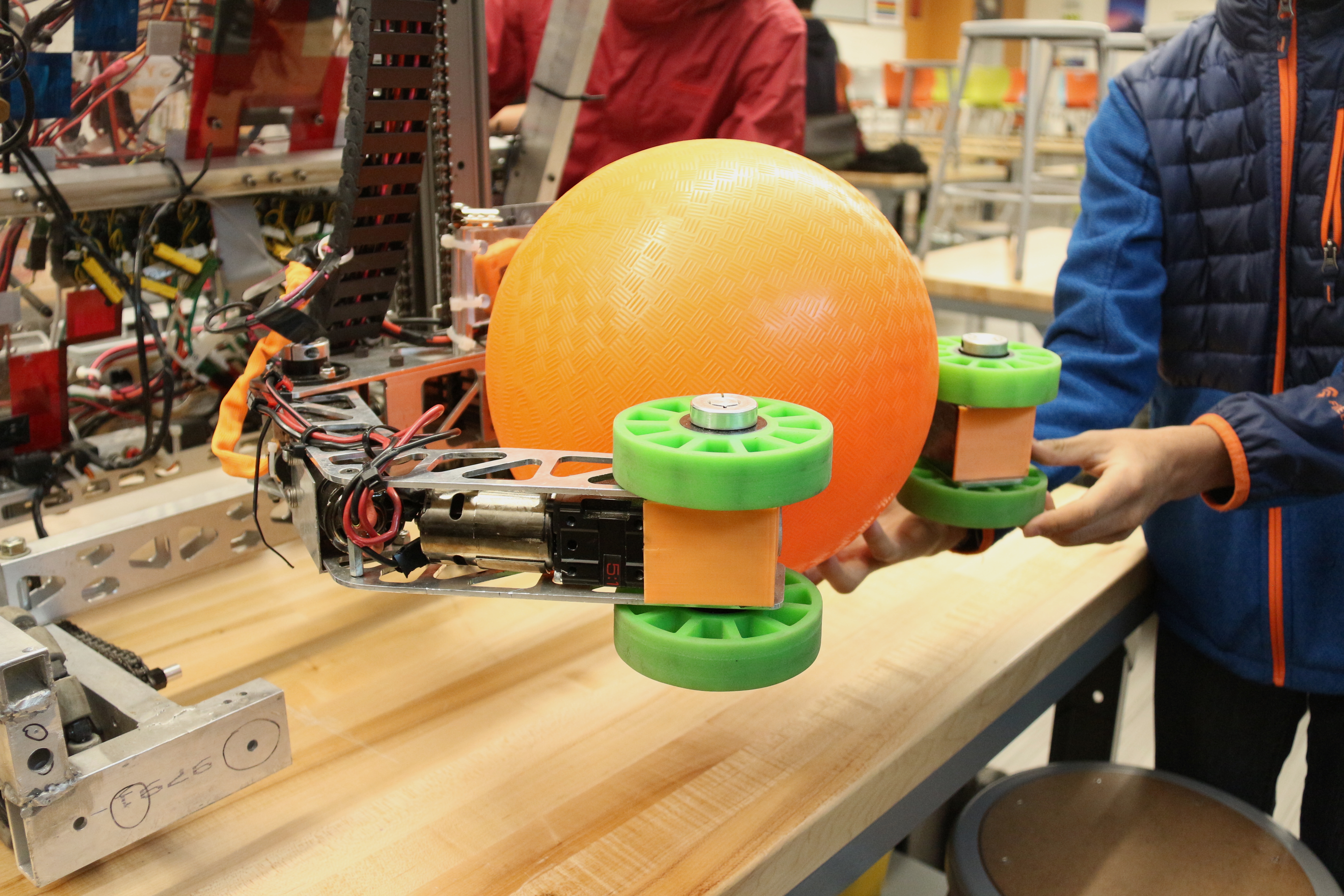
This week, we have made a consensus on the overall design of our robot, consisting of a four-wheel mecanum drive train, v-block hatch intake, and mecanum rolly grabber intake for cargo. The v-blocks and a tray for cargo are planned to be mounted on an elevator to bring the game pieces to be deposited at different heights. We decided to go with a mecanum drive train rather than our usual west coast drive because it helps with precise alignment on the rocket and cargo bay. With the confirmation of design came the beginning of fabrication, with students working diligently in the metal shop to make drive rails for the drivetrain. We were able to begin working on the drivetrain fairly quickly, as we used a parametrically CAD-ed chassis made during the offseason to save valuable work time. Although the final robot CAD is not done, we have made progress in fully designing the individual mechanisms and planning how they fit together. We are especially emphasizing discussion and design reviews in order to ultimately have a better product. Once our programmers were familiarized with our mechanisms and new code structure, the delegation of tasks began, with small groups of 2-3 people being assigned a subsystem to program. To organize the code, the programming [...]