2023 Season Recap
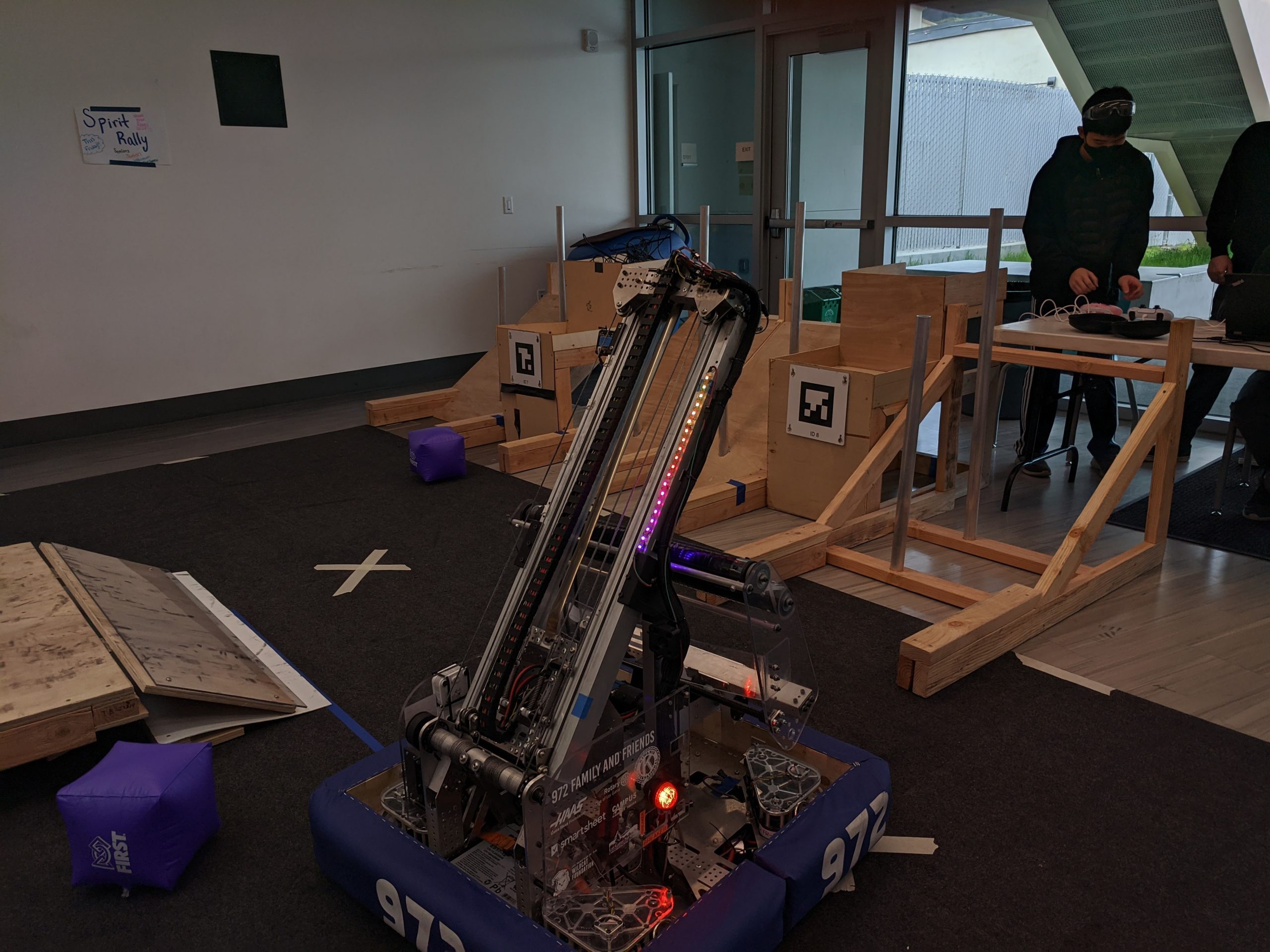
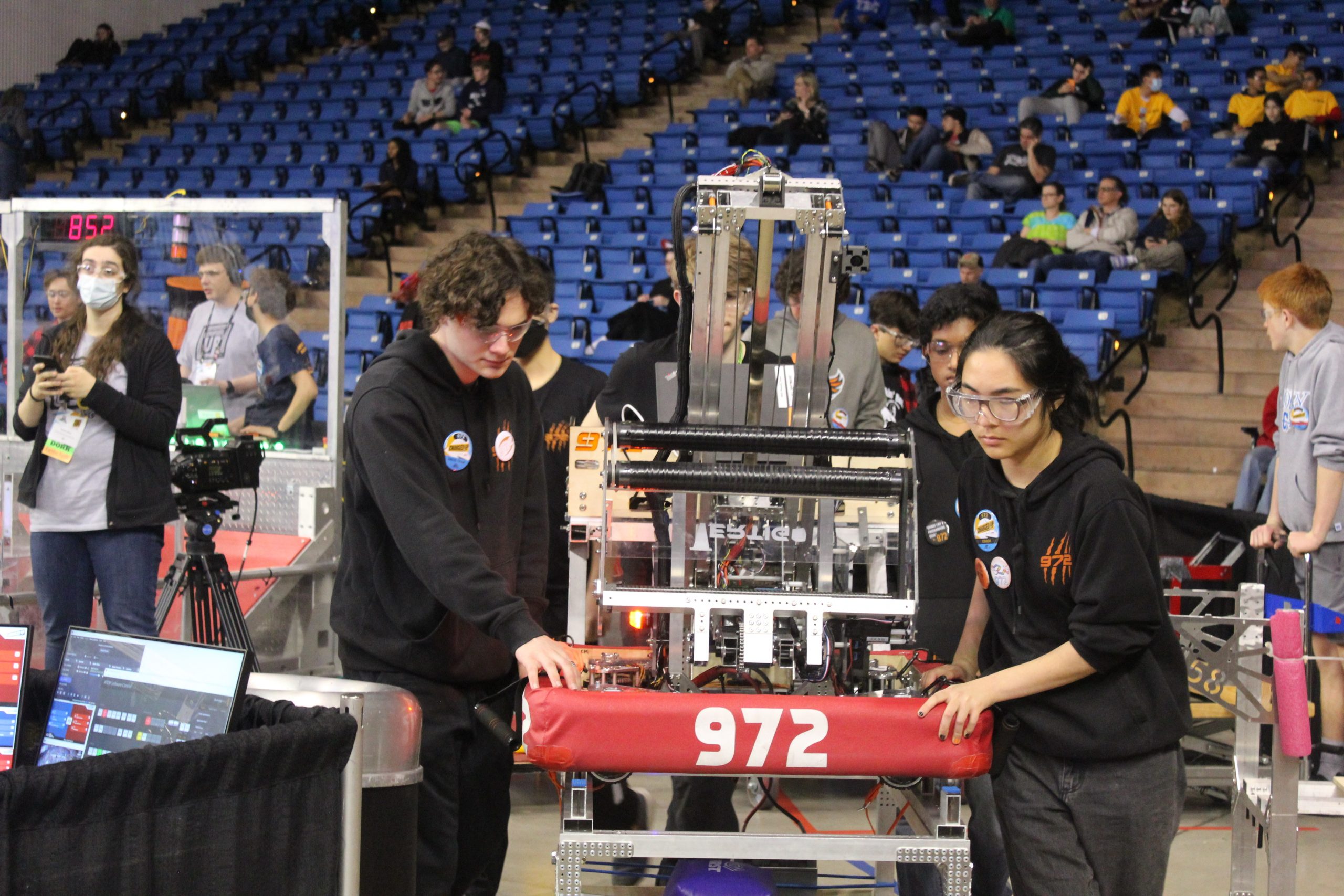
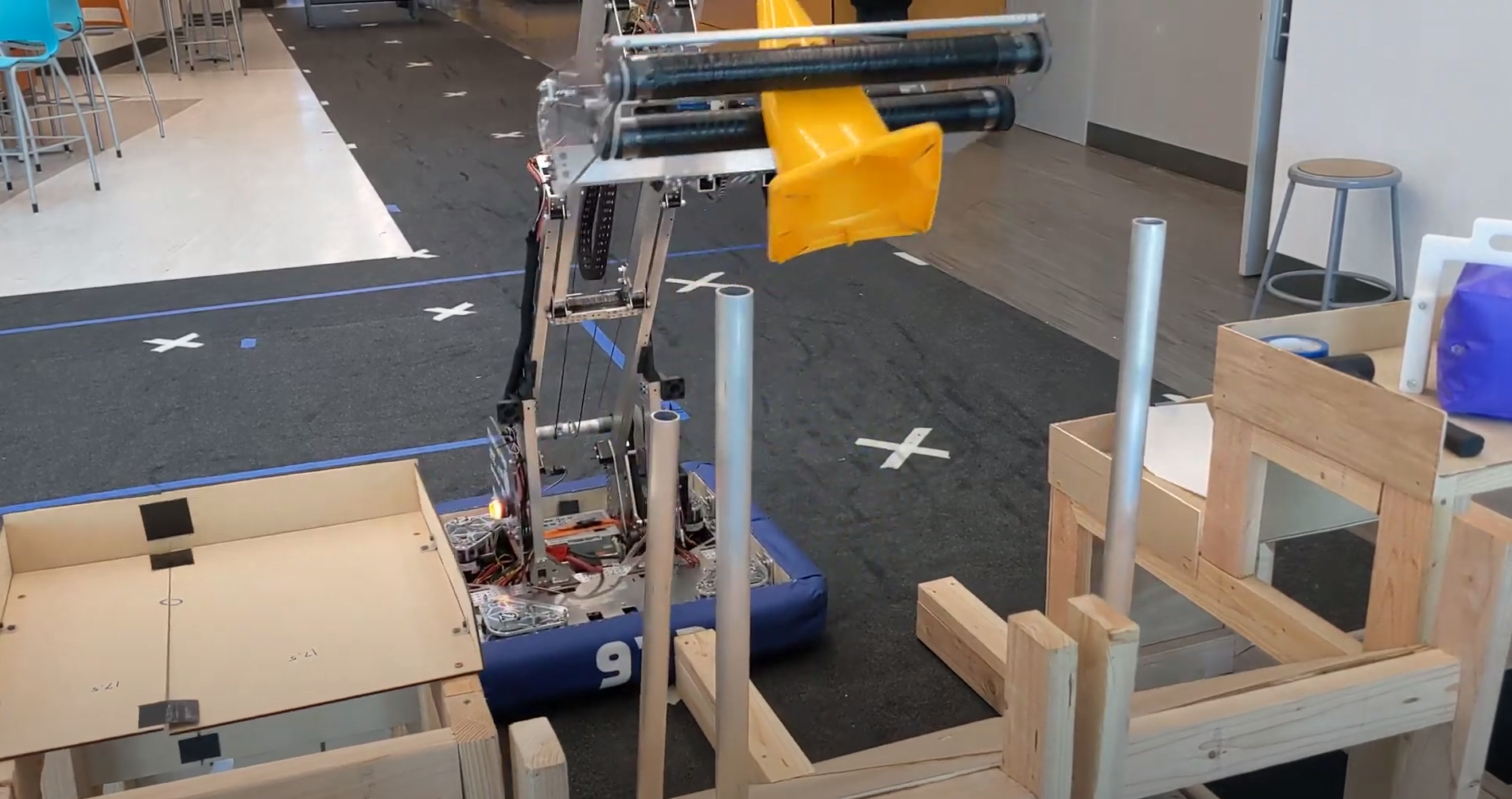
The end of the 2023 season marks a new era of outstanding potential for team Iron Claw Robotics. Throughout the season, each competition we competed in has helped us pinpoint the strengths and weaknesses of our robot, allowing us to improve our robot more and more in preparation for the World Championships. Our hard work paid off as our team celebrated our victory in the Archimedes Division, setting the bar at unprecedented heights. Our first competition, Hueneme Port Regional, was a great way for our team to test our robot early on in the season and enabled us to learn from the innovative designs of other teams. We were able to test and improve our autonomous routines, as well as score a cone in the high node by extending the elevator and the 4-bar arm. One of our most memorable matches in this competition was Quals 75, when our team got a world record score with team 1678, Citrus Circuits, and team 498, The Cobra Commanders. On the second day of competition, we made it to the playoffs, ending in 5th place, and picked team 687, the Nerd Herds, and team 2429, La Cañada Engineering Club, to be in our alliance. Although we lost in match 7 of the playoffs, we learned how we could improve the design [...]