2023 Build Blog Week Six
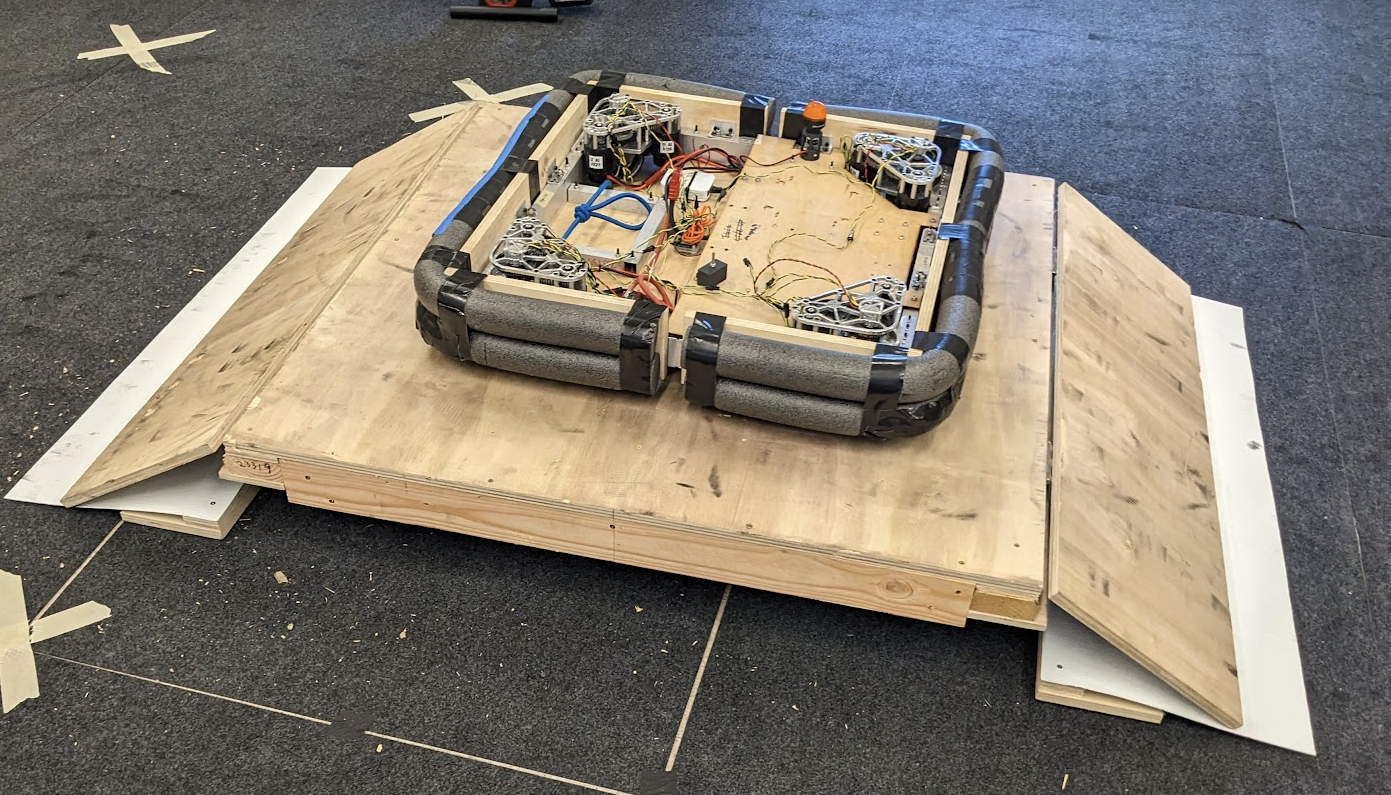
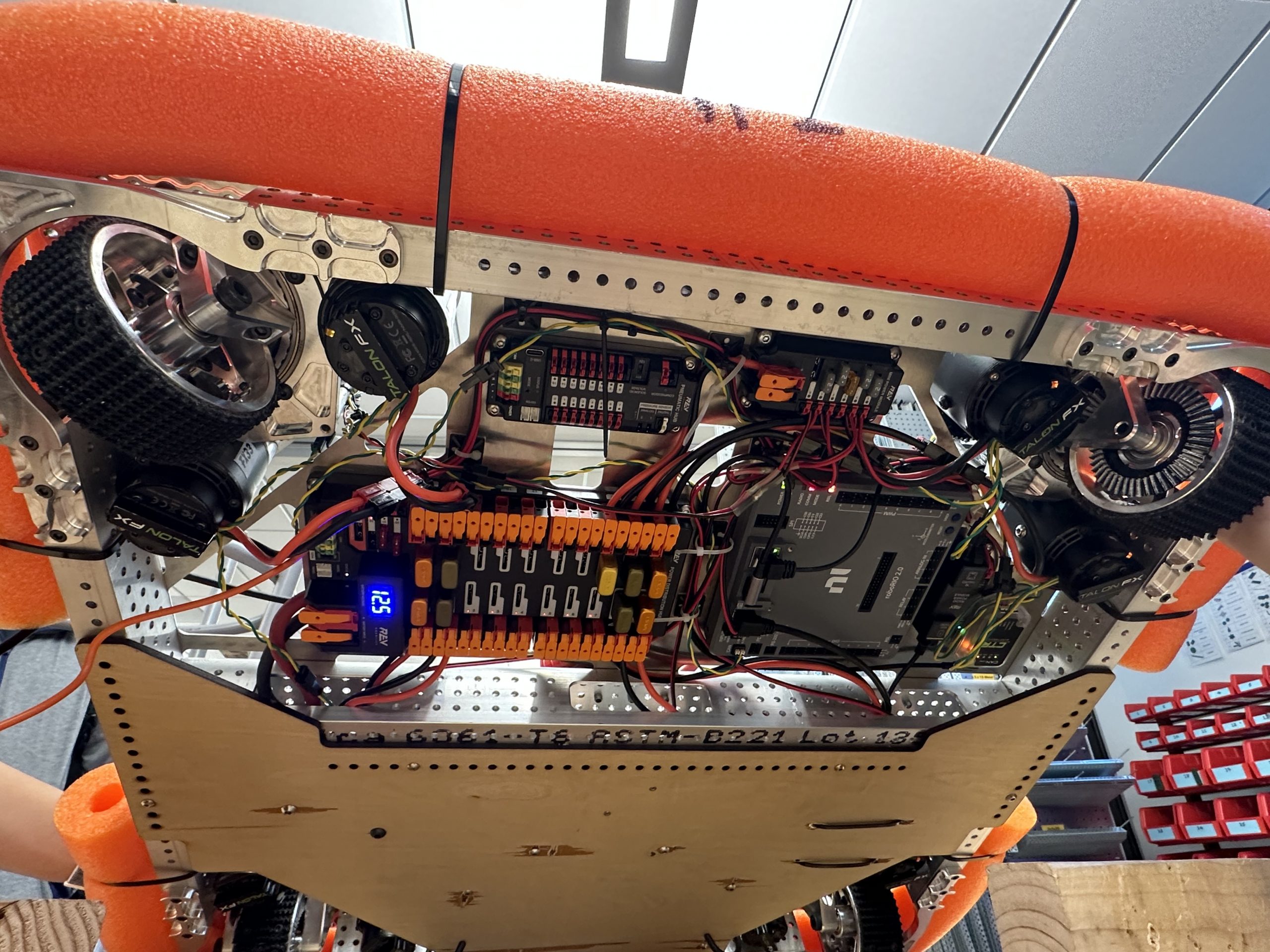
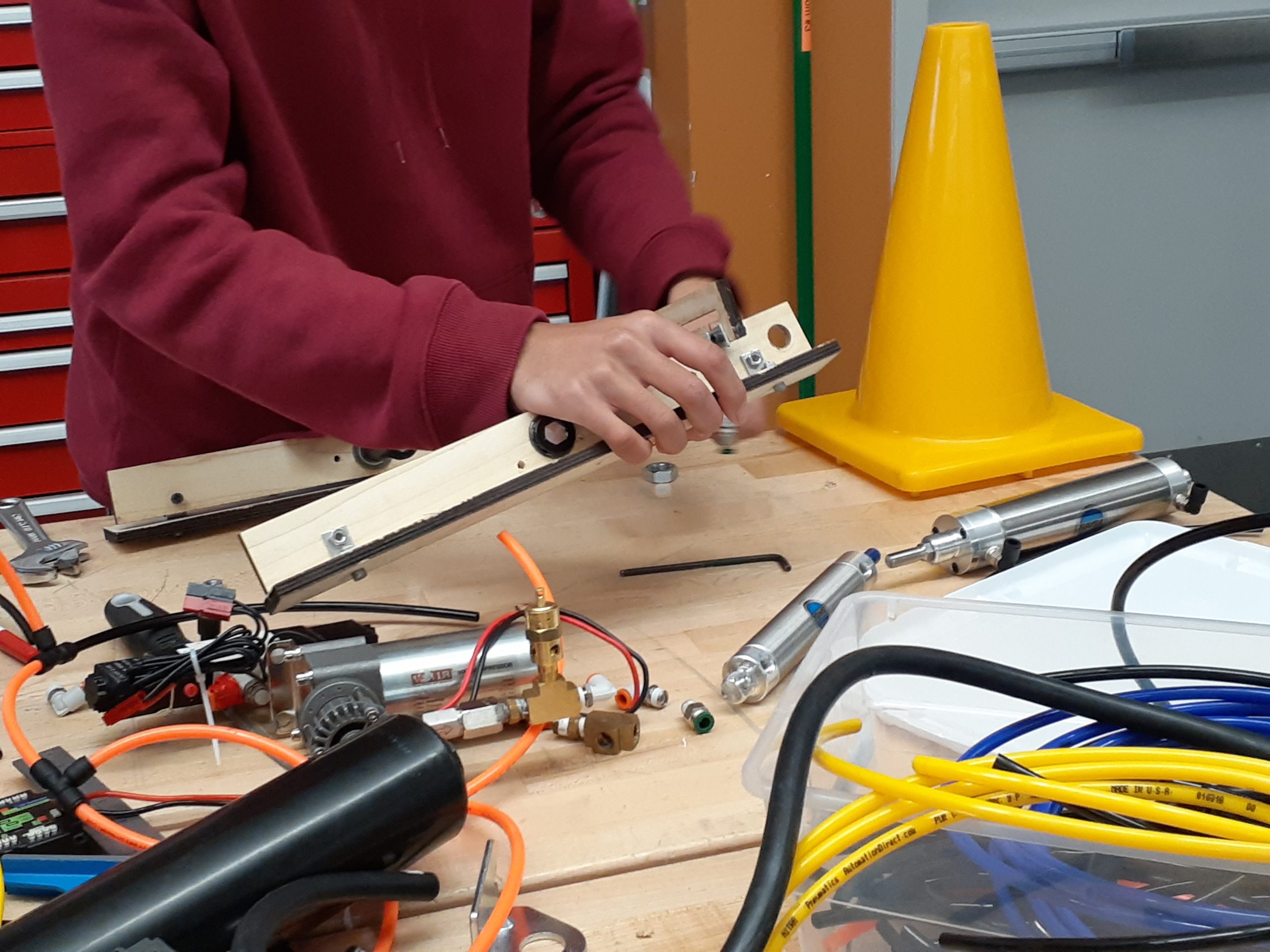
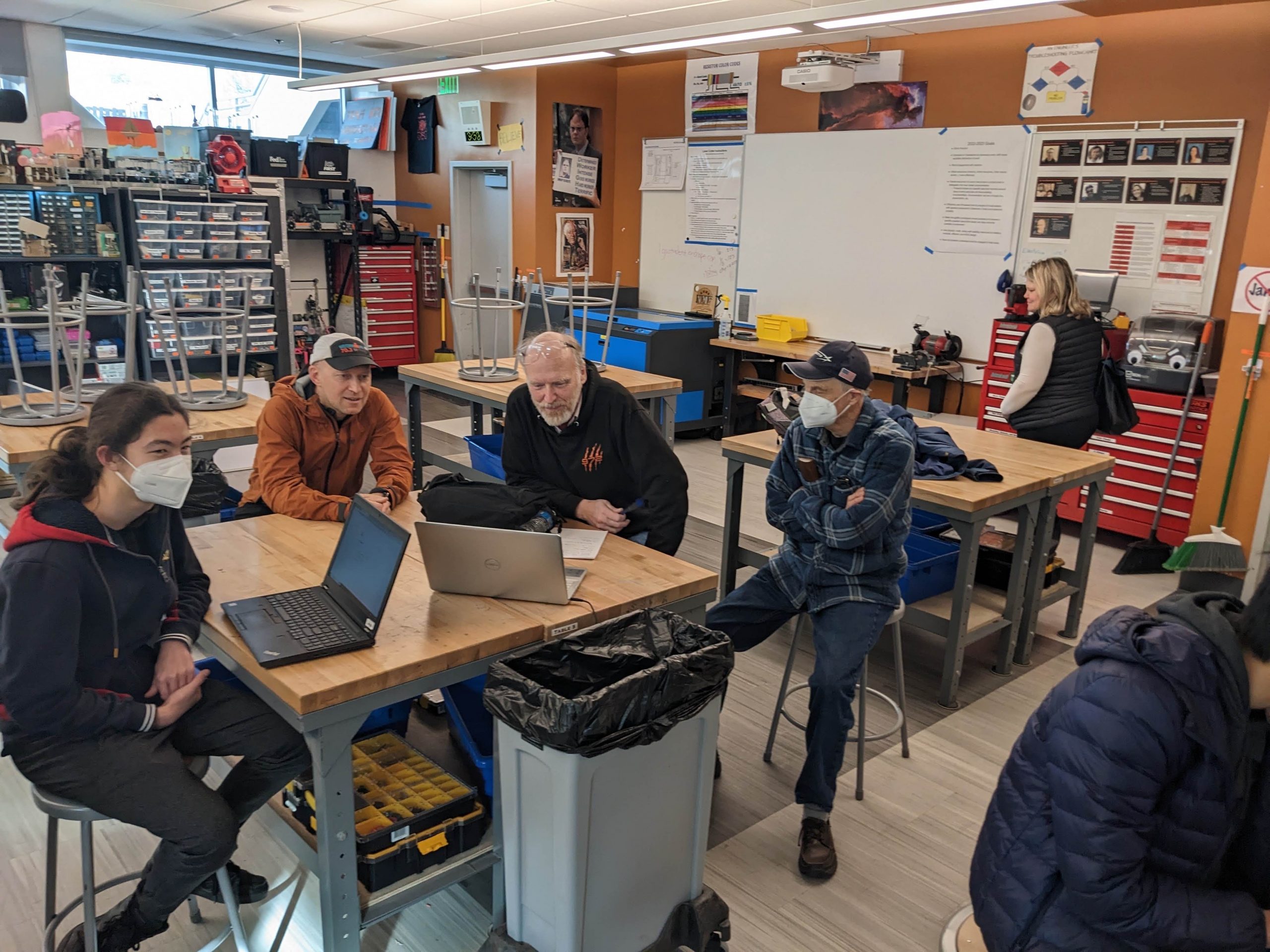
Week 6 has ended on a high note, and our team has been hard at work continuing the development of our 2023 robot. As our first competition at Hueneme Port Regional draws closer, our team needs all hands on deck in order to maximize our chances of success! The construction of our superstructure is underway. We are currently working on mounting our elevator and 4-bar arm, and the process is going very well. The elevator has already been mounted on the swerve drivetrain, and the 4-bar arm components are in the process of being machined. While the main construction of the robot is going on, our separate subteams are hard at work doing individual subteam tasks. With the robot beginning to be constructed, our programmers have been able to start testing their code. The programming team is currently working on the elevator code and they will soon be able to test it on the elevator. They are also working on starting the automatic charge station balance code, which would allow our robot to balance on the charge station in an instant using a button. The Intake code is complete and the 4-bar arm code has been merged to main. The Scouting team has been modifying our scouting app to make it more efficient and easier to use for [...]